

Model based predictive control for automated lane centering/changing control systems
A model prediction, semi-automatic technology, applied in the direction of automatic steering control components, steering control installed on the vehicle, non-mechanical steering control components, etc., can solve the problem of system complexity of steering angle command
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0086] The following discussion of embodiments of the invention relating to systems and methods for providing vehicle steering angle control for lane alignment or lane changing purposes in automated or semi-automated vehicles is merely exemplary in nature and not intended to be limiting The invention or its application or use.
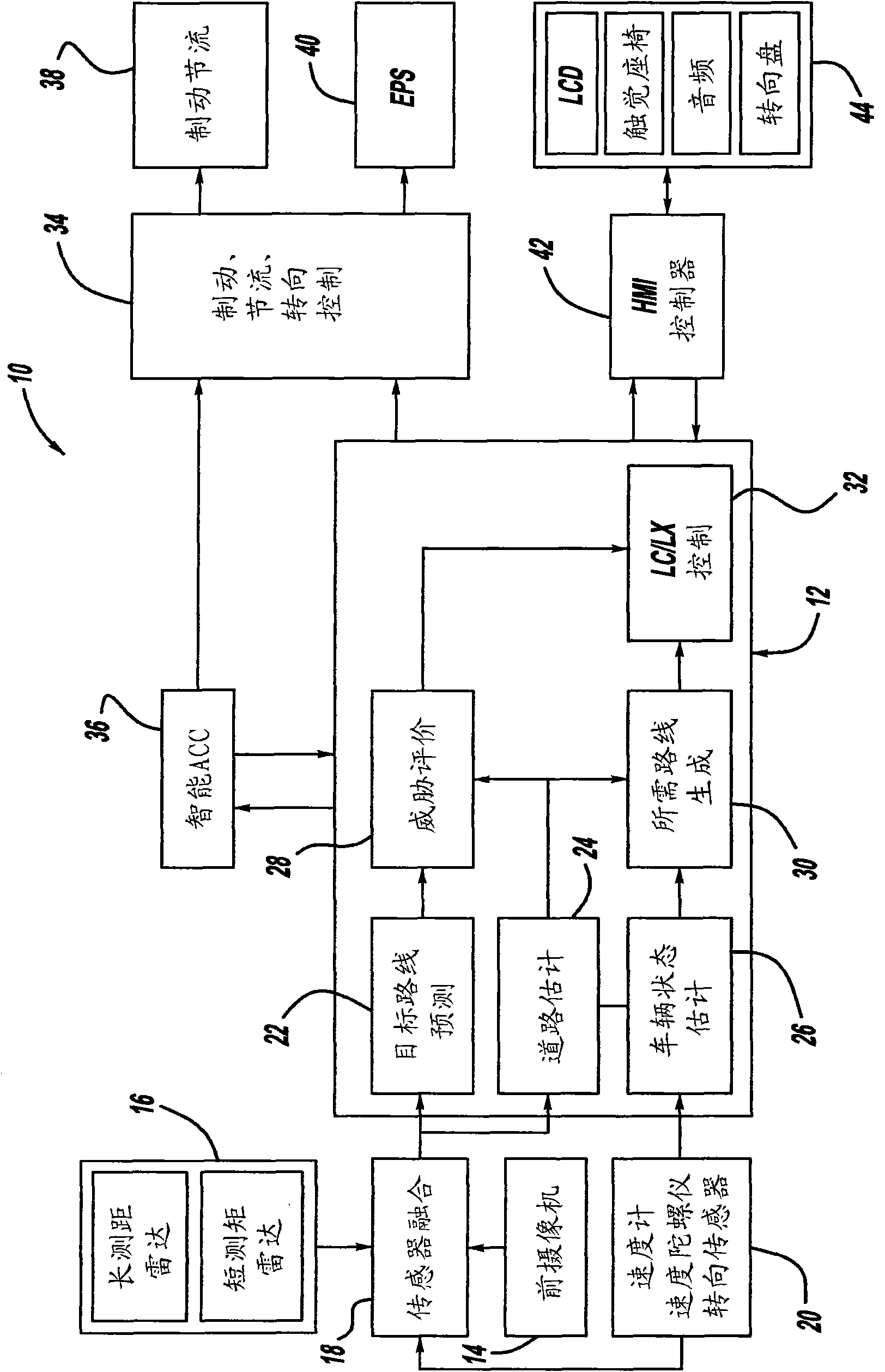
[0087] figure 1 is a diagram of a vehicle system 10 including a lane change adaptive cruise control (LXACC) core algorithm 12 including lane alignment and lane change control, which will be described in detail below. The known LXACC system provides a unified framework for automatic lateral movement control such as automatic lane changing and lane alignment functions. Since the lateral dynamics of the vehicle are related to the longitudinal movement of the vehicle, the longitudinal movement control is usually considered in the same framework.
[0088] The system 10 includes a forward-looking camera 14 and long-range and near-range radars 16 that detec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More