Self-driven mower
A lawn mower and self-propelled technology, used in harvesters, motors, cutters, etc., can solve problems such as battery damage, and achieve the effects of extending service life, improving comfort, and reducing losses
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
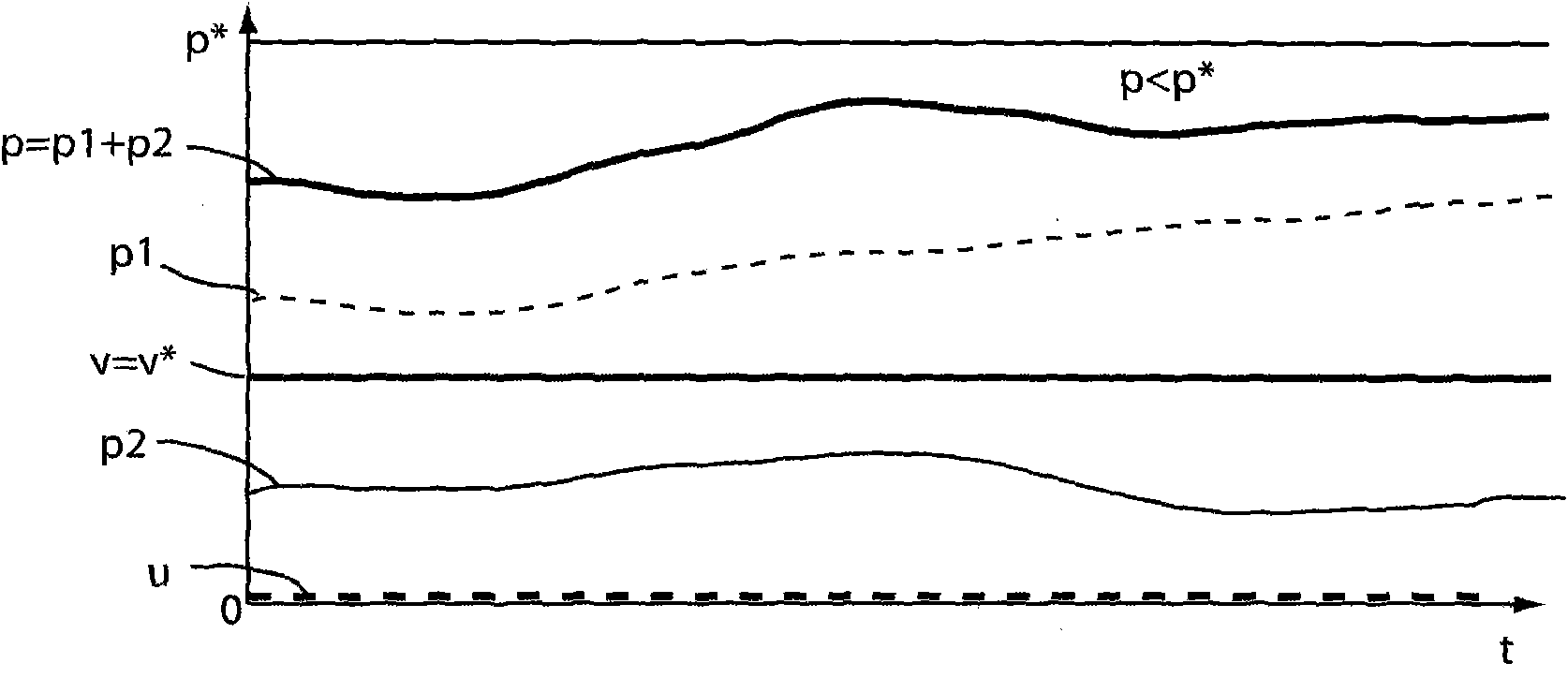
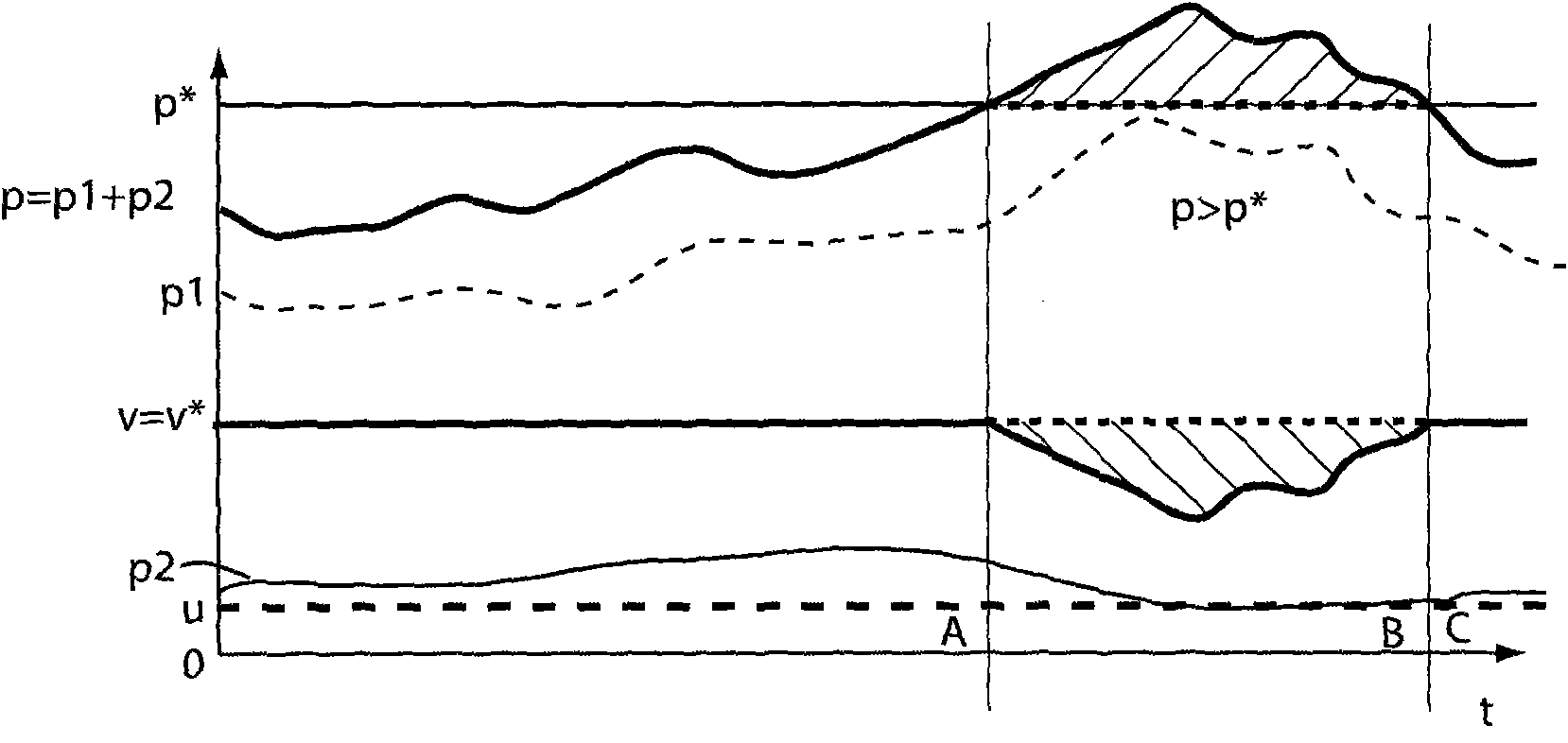
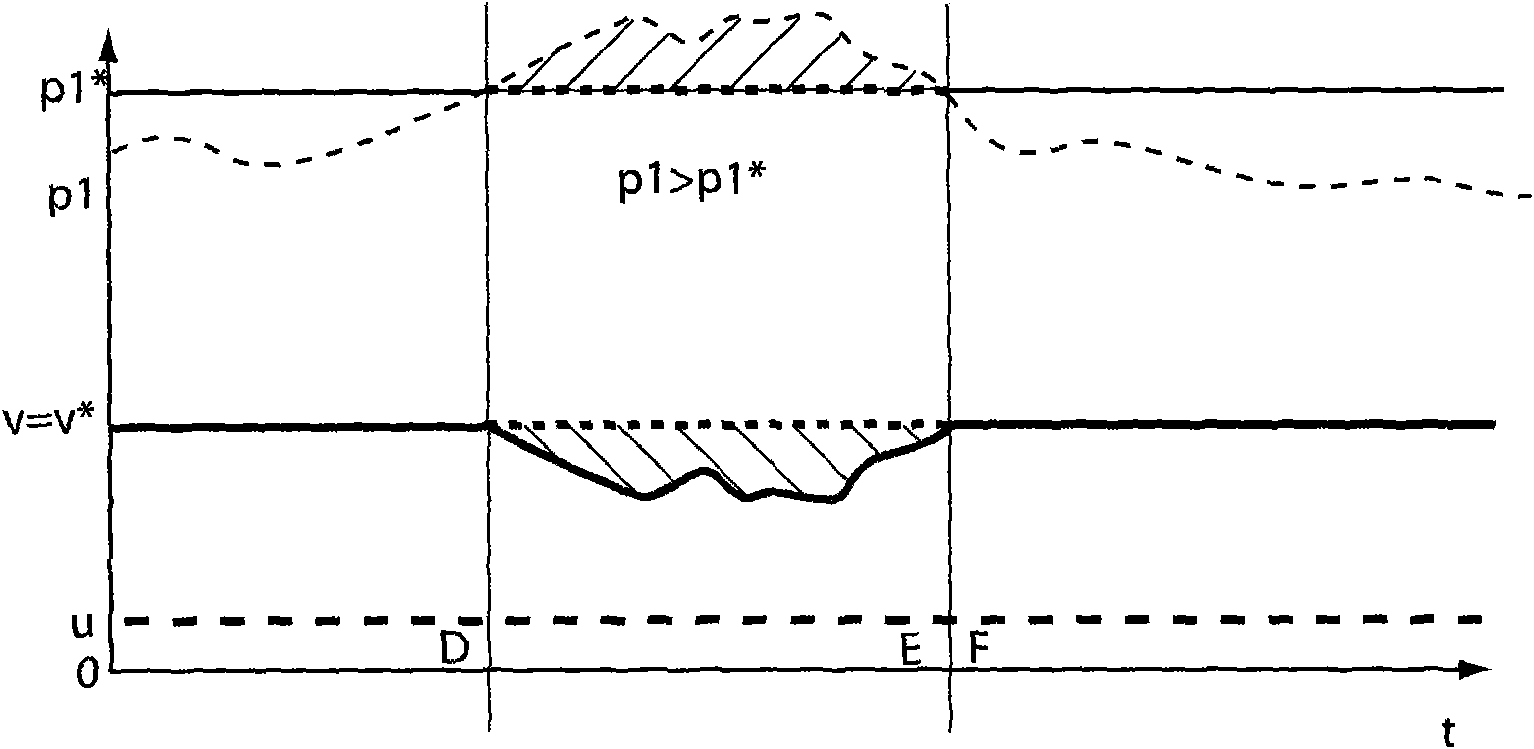
[0087] figure 1 with figure 2 The driving schematic diagram of the electric lawn mower of the present invention changing with time t is disclosed. Except for the control unit, the lawn mower of the present invention has a traditional structure and includes an electric blade motor for rotating and driving the cutting blades. The blade motor is operatively connected to a battery; used to drive the lawn mower along the lawn that needs to be trimmed The electric drive motor is operatively connected to the battery. Reference Figure 4 to Figure 7 As will be described, the present invention provides a control unit and associated components for controlling the movement of the lawn mower through the blade motor and the driving motor. Preferably, the electric drive motor acts on at least one rear wheel.
[0088] In order to more easily explain the purpose of the present invention, in figure 1 In, it is set that the operator does not push the lawnmower, so the operator does not perform a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More