

Vehicle control device
A vehicle control device and vehicle technology, applied in the direction of control devices, motorcycles, bicycles, etc., can solve the problems of inability to track driving, reduce the automatic tracking control accuracy and delay of subsequent vehicles, and achieve delay-free automatic tracking driving control, High-precision automatic tracking driving control, the effect of avoiding the danger of collision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
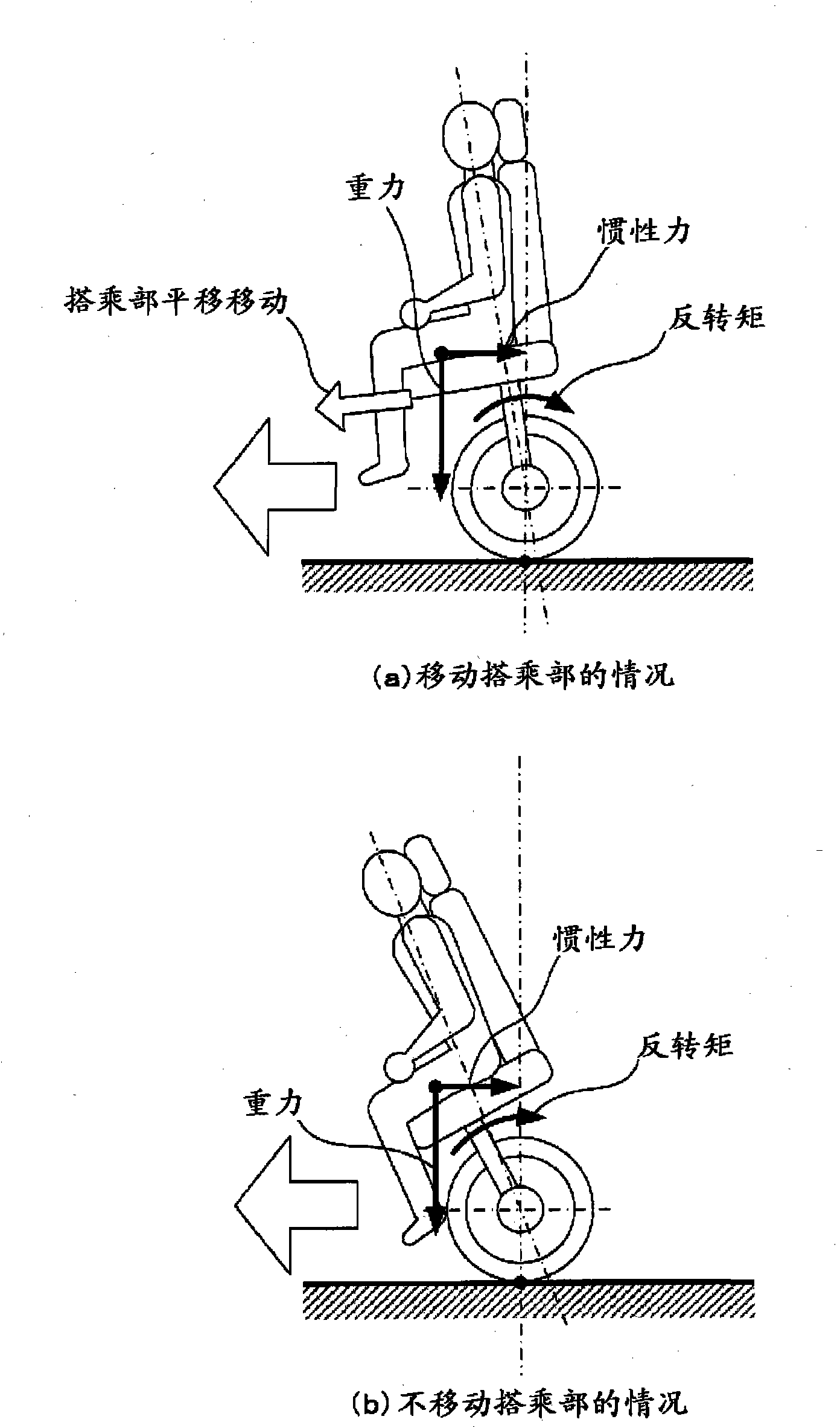
[0041] Hereinafter, embodiments of the present invention will be described in detail with reference to the drawings. figure 1 It is used to show a state in which the movement of the boarding section is accelerated at a small inclination angle in this embodiment. In the present embodiment, the boarding section including the passenger is relatively translated in the front-rear direction of the vehicle to maintain the balance of the vehicle body (inverted state). That is, as figure 1 As shown in (a), in order to accelerate and decelerate in accordance with the target driving state (acceleration, deceleration, stop, etc.) based on the operation of the passenger, in order to maintain a gap between the reaction torque to the driving wheel acting on the vehicle body and the inertial force accompanying the acceleration The balance of will include the translational movement of the passenger’s riding part in the direction of acceleration. In this way, the inclination angle of the vehicle...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More