

Position error forecasting method for GPS (Global Position System)/MEMS-INS (Micro-Electricomechanical Systems-Inertial Navigation System) integrated navigation system based on SET2FNN
A technology of integrated navigation system and prediction method, which is applied in the field of positioning error prediction of GPS/MEMS-INS integrated navigation system, can solve the problems of poor model adaptive ability and dynamic performance, large influence of inertial device output noise, positioning error, etc., to achieve The effect of enhancing positioning performance, ensuring real-time performance, and improving prediction accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The following briefly introduces the related technologies used in the present invention.
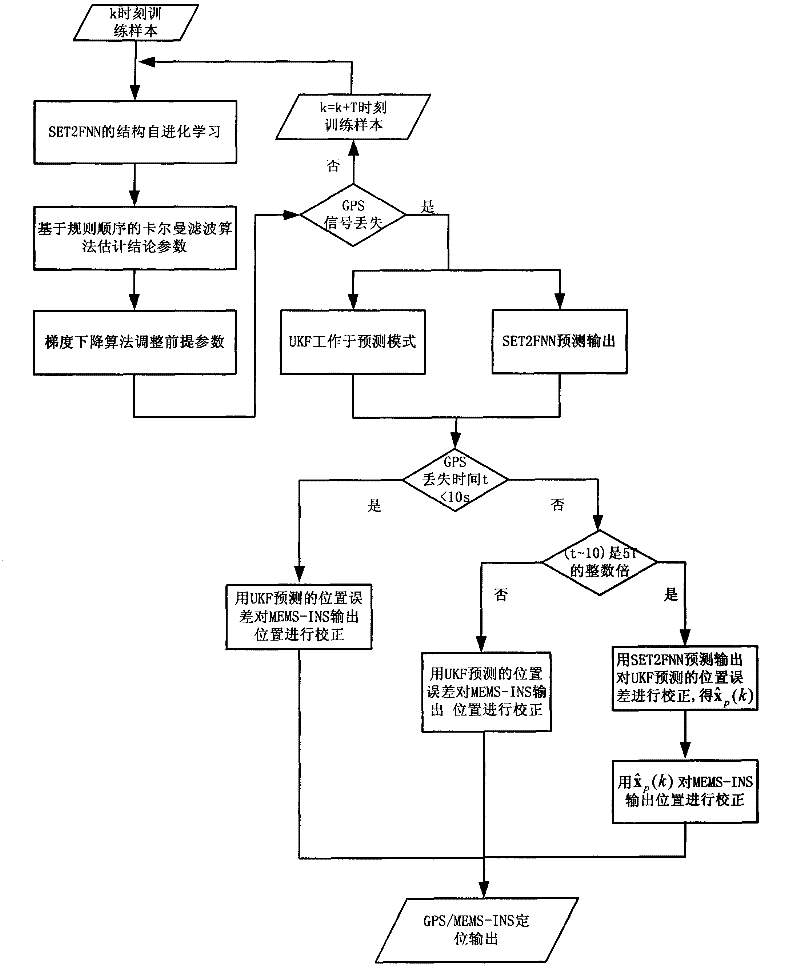
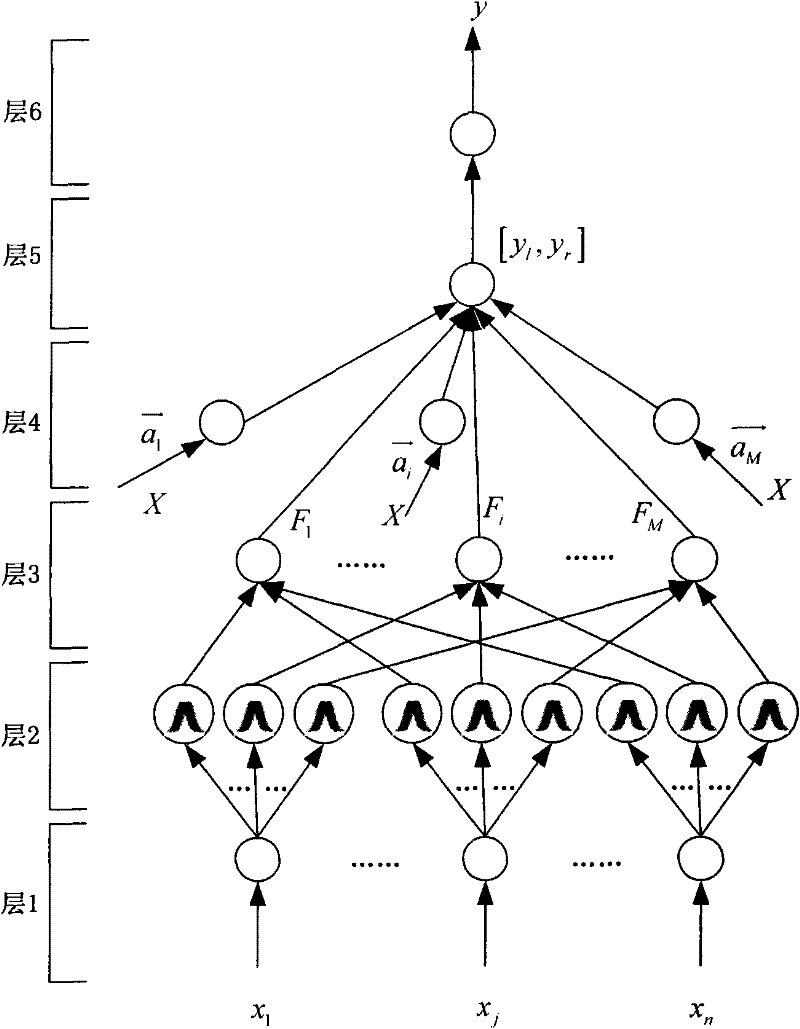
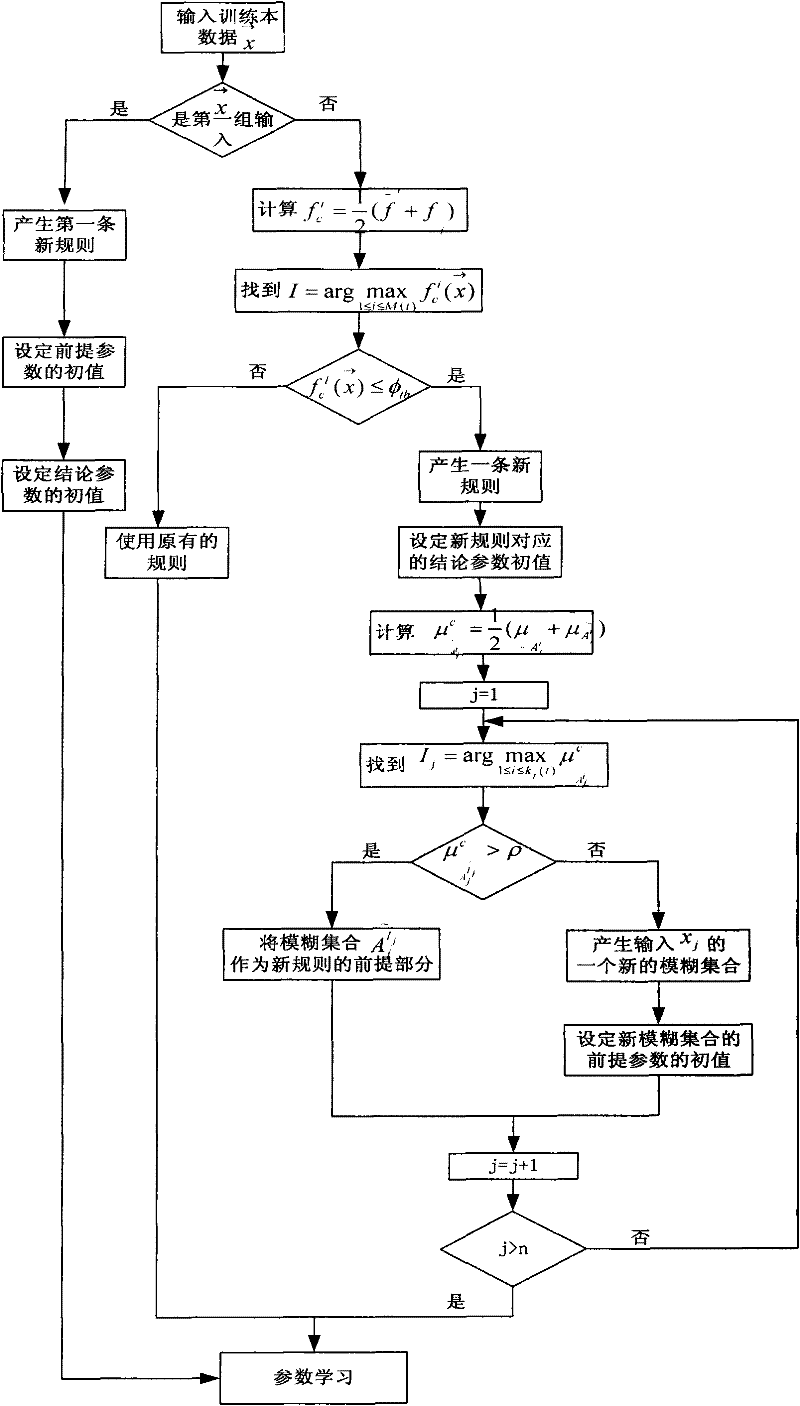
[0024]SET2FNN is a neural network based on interval type-2 fuzzy logic system proposed by Chia-Feng Juang and Yu-Wei Tsao of National Chung Hsing University in Taiwan in 2008. First, compared with ANFIS based on type-1 fuzzy logic system, SET2FNN is more suitable for dealing with uncertain problems, such as data with noise, different language meanings, etc., due to the use of type-2 fuzzy logic system. However, the noise in the output data of MEMS inertial devices (gyroscope and accelerometer) is generally relatively large, and the output of inertial devices is generally used as the input of the neural network to predict the positioning error, so SET2FNN can be applied to the prediction of GPS / MEMS-INS positioning error. . In addition, the structure of SET2FNN is generated online, and the structure and rules are adjusted in real time according to the training samples, so it is mo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More