

Self-evolution ANFIS and UKF combined GPS/MEMS-INS integrated positioning error dynamic forecasting method
A technology of error dynamics and prediction methods, applied in satellite radio beacon positioning systems, measurement devices, surveying and mapping and navigation, etc., can solve problems such as large prediction errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
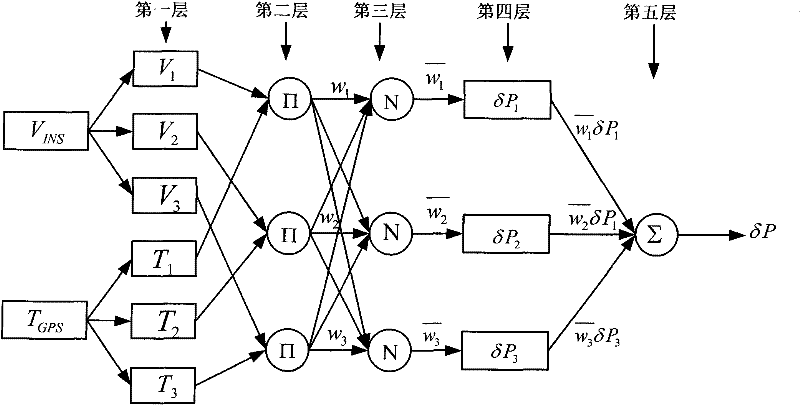
[0034] The structure diagram of ANFIS is as follows: figure 2 As shown, here it is assumed that the fuzzy inference system has two inputs: the speed V of the INS output INS and GPS signal loss time T GRS , and the single output is the position estimation error when the UKF is in the prediction state. Using the first-order Sugeno fuzzy model, assuming that each input corresponds to three fuzzy sets, the general rule set with M (here M is assumed to be 3) fuzzy if-then rules is as follows:
[0035] Rule i: If V INS ∈V i ,T GPS ∈T i , then δP i =p i V INS +q i T GPS + r i , i=1, 2..., c
[0036] Here the nodes of the same layer have the same function (the output of the i-th node in layer 1 is O l,i ), the mathematical functions of each layer are introduced as follows:
[0037] Layer 1 Each node i in this layer is an adaptive node with a node function.
[0038] O 1 , i = ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More