

Full-autonomous flight control method for quadrotor unmanned aerial vehicle based on vision SLAM
A four-rotor UAV, flight control technology, applied in the direction of attitude control, etc., can solve the problems of signal interference, poor real-time performance of the system, lack of real-time performance, effectiveness and versatility, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055] The vision SLAM-based autonomous flight control method of the quadrotor UAV of the present invention will be described in detail below in conjunction with the embodiments and accompanying drawings.
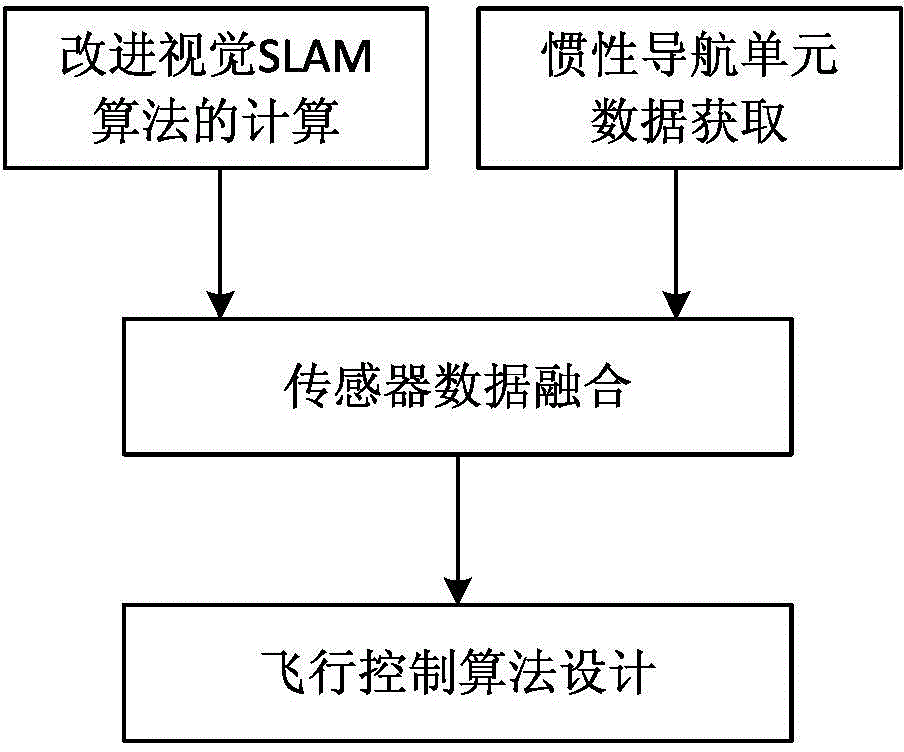
[0056] Aiming at the problem of autonomous flight control of UAVs in the absence of GPS signals, the present invention designs a vision-based autonomous positioning and control method. The invention firstly improves the traditional visual SLAM algorithm, improves the robustness and universality of the algorithm, and then uses the algorithm to obtain the three-dimensional position information of the drone. On this basis, the extended Kalman filter is used to fuse the visual information and the three-dimensional acceleration information provided by the inertial navigation unit to obtain more accurate position information, and at the same time increase the signal output frequency. Finally, the position information of the UAV obtained by the above method is designed through the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More