Running instant anti-collision warning system and method
An anti-collision and driving information technology, applied in anti-collision systems and other directions, can solve the problems of unsuitable driving speed, limited signal transmission distance and high cost, and achieve the effect of reducing the probability of collision and improving driving safety.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
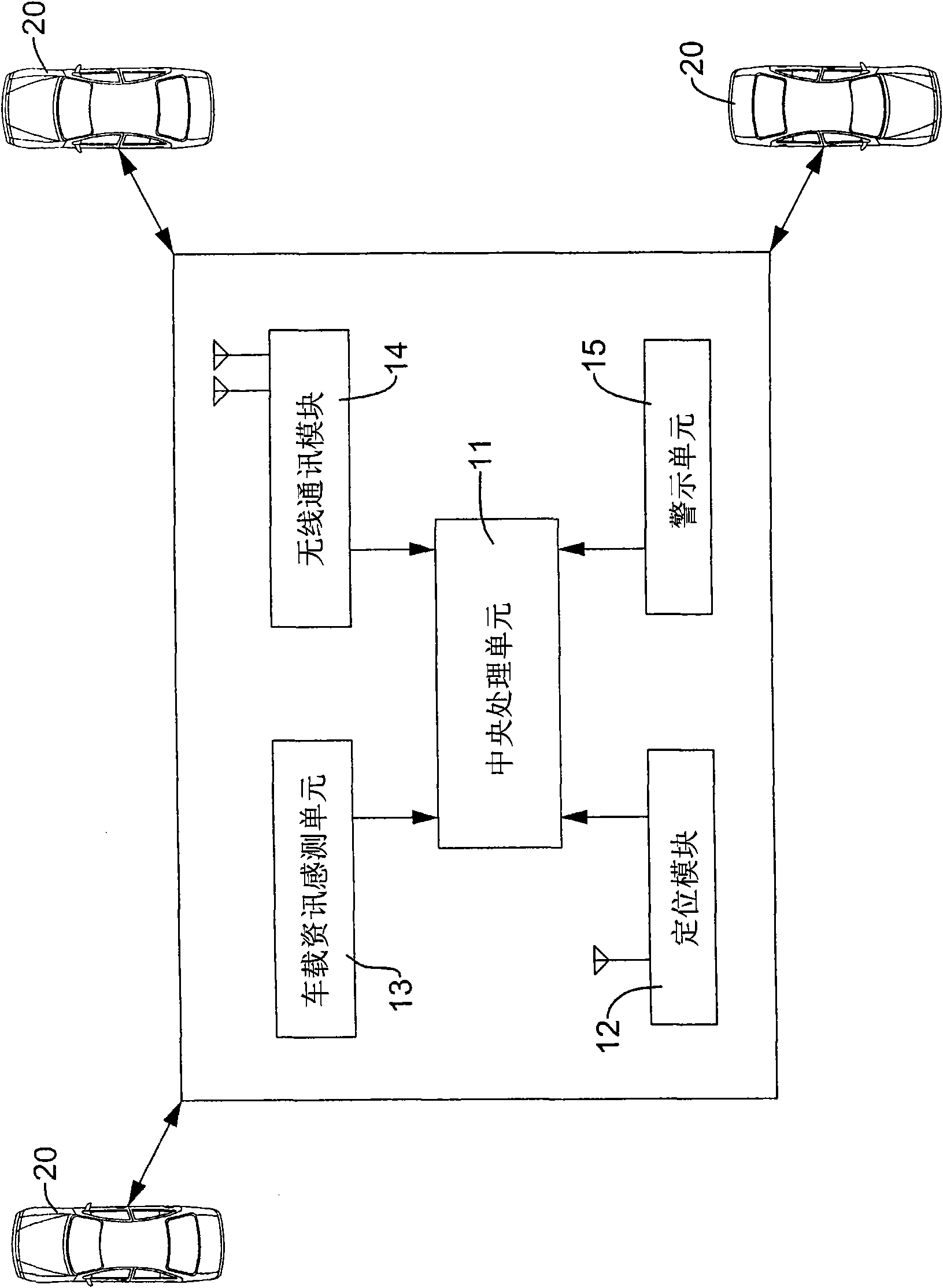
[0039] Please refer to figure 1 As shown, the system of the present invention is integrated in the middle of the vehicle, and its basic structure includes:
[0040] A positioning module 12, which locates a vehicle position;
[0041] A central processing unit 11, which receives the position of the vehicle and estimates the speed and heading of the vehicle and integrates it into a vehicle information package, and has a built-in anti-collision calculation program and is responsible for data processing and calculation;
[0042] An in-vehicle information sensing unit 13, which detects and captures various in-vehicle information of the vehicle and transmits it to the central processing unit 11, such as direction lights, brake status, accelerator status, etc.;
[0043] A wireless communication module 14, connected to the central processing unit 11 and broadcasting the driving information packet sent by the central processing unit 11, the driving information packet may include the ve...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



