

Autonomic multi-mode management method
A multi-modal and modal technology, applied in the direction of program control devices, etc., can solve problems such as low conversion efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
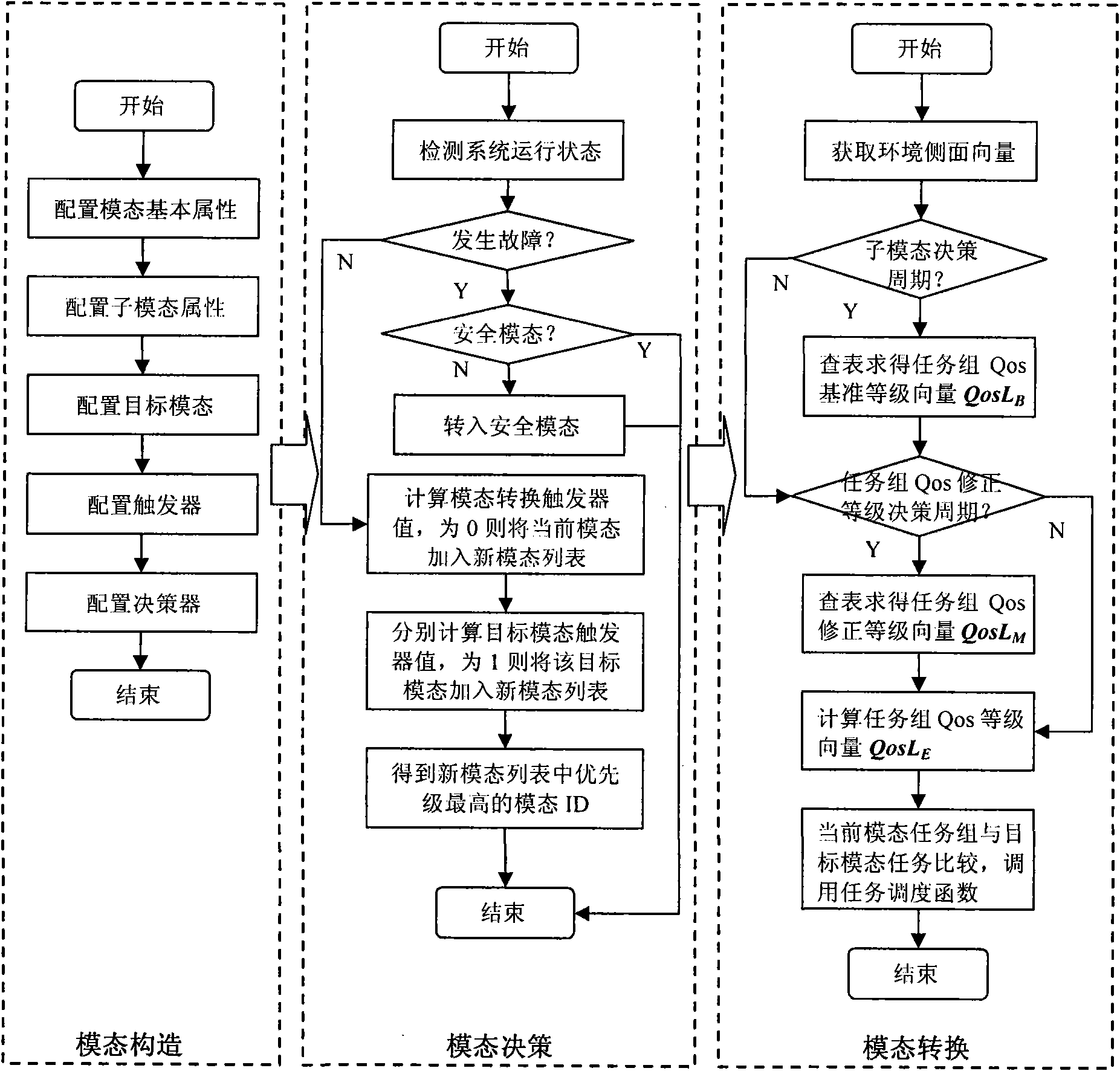
[0054] figure 1 The multimodal autonomic management execution flow of the present invention is described. The present invention has been successfully implemented in the autonomous mobile robot computing platform, and the specific implementation steps are as follows:
[0055] Step 1: Modal representation and construction.
[0056] Step 11: Configure the basic properties of the modal, including modal ID, modal name, modal type and modal priority, such as figure 1 shown. In this example, the system has 6 modes in total, and the mode ID ranges from 0 to 5. The modal names are initial modal, termination modal, cruise modal, search modal, tracking modal and safe modal. Among them, cruise, search and track are mission modes, and the other three modes are special modes. The 6 mode priorities are set to 0, 0, 0, 1, 2, 3 respectively, and the security mode has the highest priority;
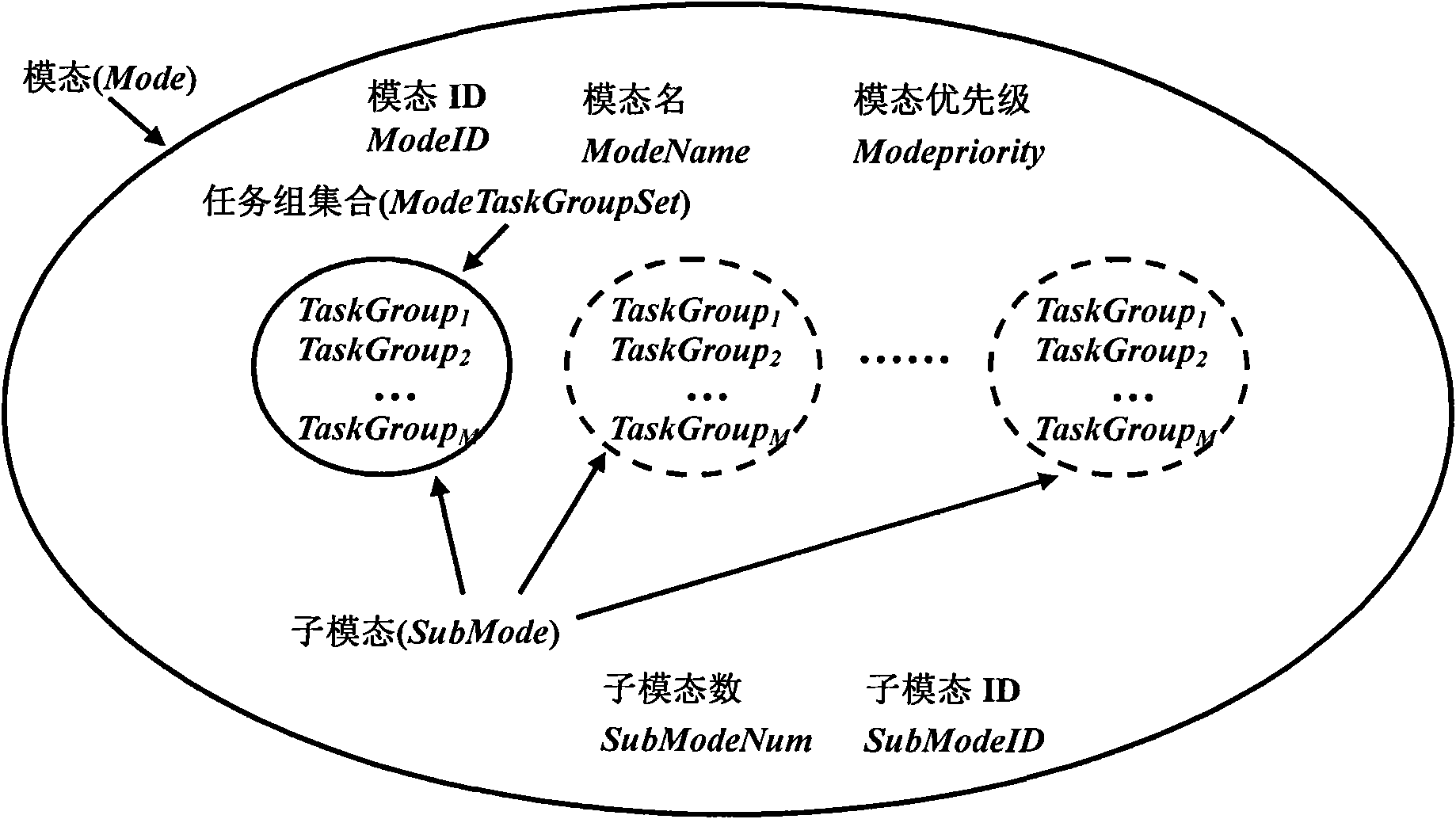
[0057] Step 12: Configure submodal properties, such as figure 2 shown. Sub-modals are secondary...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More