

Inertial navigation positioning method based on CCD (Charge Coupled Device) star sensor and accelerometer
A technology of accelerometer and star sensor, which is applied in the field of inertial navigation and positioning, and can solve problems such as deterioration of attitude matrix
Inactive Publication Date: 2011-01-12
HARBIN ENG UNIV
View PDF4 Cites 9 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
When calculating the attitude matrix, regardless of the above-mentioned inertial navigation system, the gyro is used to measure the angular velocity, and the attitude matrix is presented through a certain physical and mechanical control or a certain algorithm. Because the gyro itself drifts, it is difficult to navigate for a long time. Attitude matrix in INS degrades over time when working
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples


Examples
Experimental program
Comparison scheme
Effect test
Embodiment Construction
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
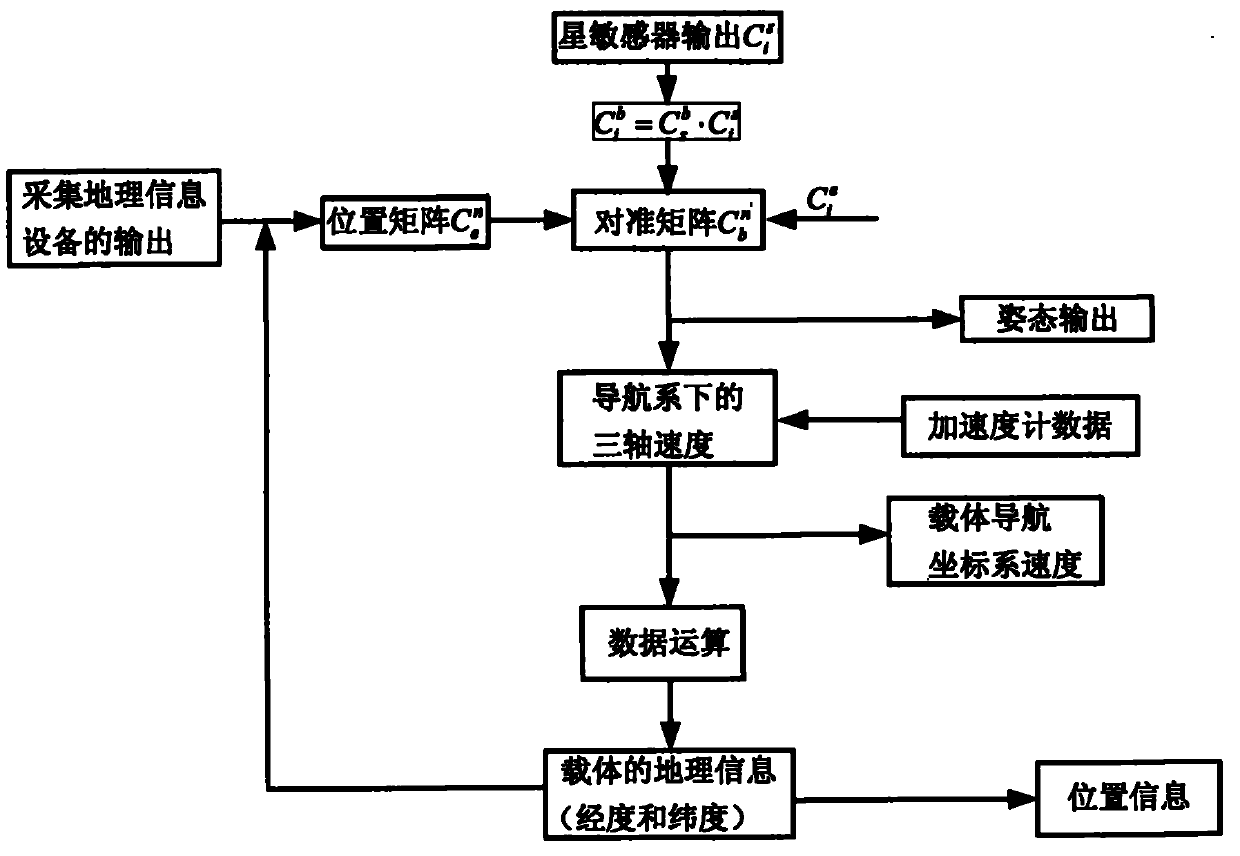
The invention provides an inertial navigation positioning method based on a CCD star sensor and an accelerometer, which comprises the following steps of: (1) after initial alignment is finished, acquiring the output data of the quartz flexible accelerometer; (2) acquiring the output of the CCD star sensor; (3) acquiring the output positioning information in an inertial navigation algorithm in an error-free state to obtain the transfer matrix of an earth based coordinate system, i.e. an e system relative to a navigation coordinate system, i.e. an n system; (4) solving the transfer matrix of the e system relative to an i system; (5) resolving to obtain an attitude matrix through the information given in the steps (1), (2), (3) and (4); and (6) converting the accelerometer onto the navigation coordinate system from a carrier coordinate system through the attitude information resolved in the step (5), and outputting the carrier speed and the navigation positioning information. The invention has position information feedback, thereby having the advantages of periodicity and high positioning precision.
Description
technical field The invention relates to a navigation positioning method, in particular to an inertial navigation positioning method. Background technique The inertial navigation system is a navigation device that uses accelerometers and gyroscopes to measure the acceleration and angular velocity of the carrier, and obtains the real-time position of the carrier through calculation. It is an autonomous navigation system. When the inertial navigation system is working, it neither transmits nor receives any electromagnetic wave signals from the outside world. Therefore, it has the characteristics of autonomy, concealment, real-time and not restricted by geographical, time and climate conditions, and can conveniently provide the three-dimensional attitude parameters of the carrier. The inertial navigation system is divided into a strapdown type and a platform type inertial navigation system. The working principles of the two types of inertial navigation systems are the same. W...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More Patent Type & AuthorityApplications(China)
IPC IPC(8): G01C21/16G01C21/20
Inventor高伟付建楠张鑫奔粤阳徐博周广涛于强张永刚吴晓王秋滢
OwnerHARBIN ENG UNIV