

Path planning method and system
A path planning and road technology, applied in the field of transportation, can solve the problem of high query complexity, achieve the effect of improving search efficiency and reducing complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] The present invention will be described in detail below with reference to the accompanying drawings and in combination with embodiments.
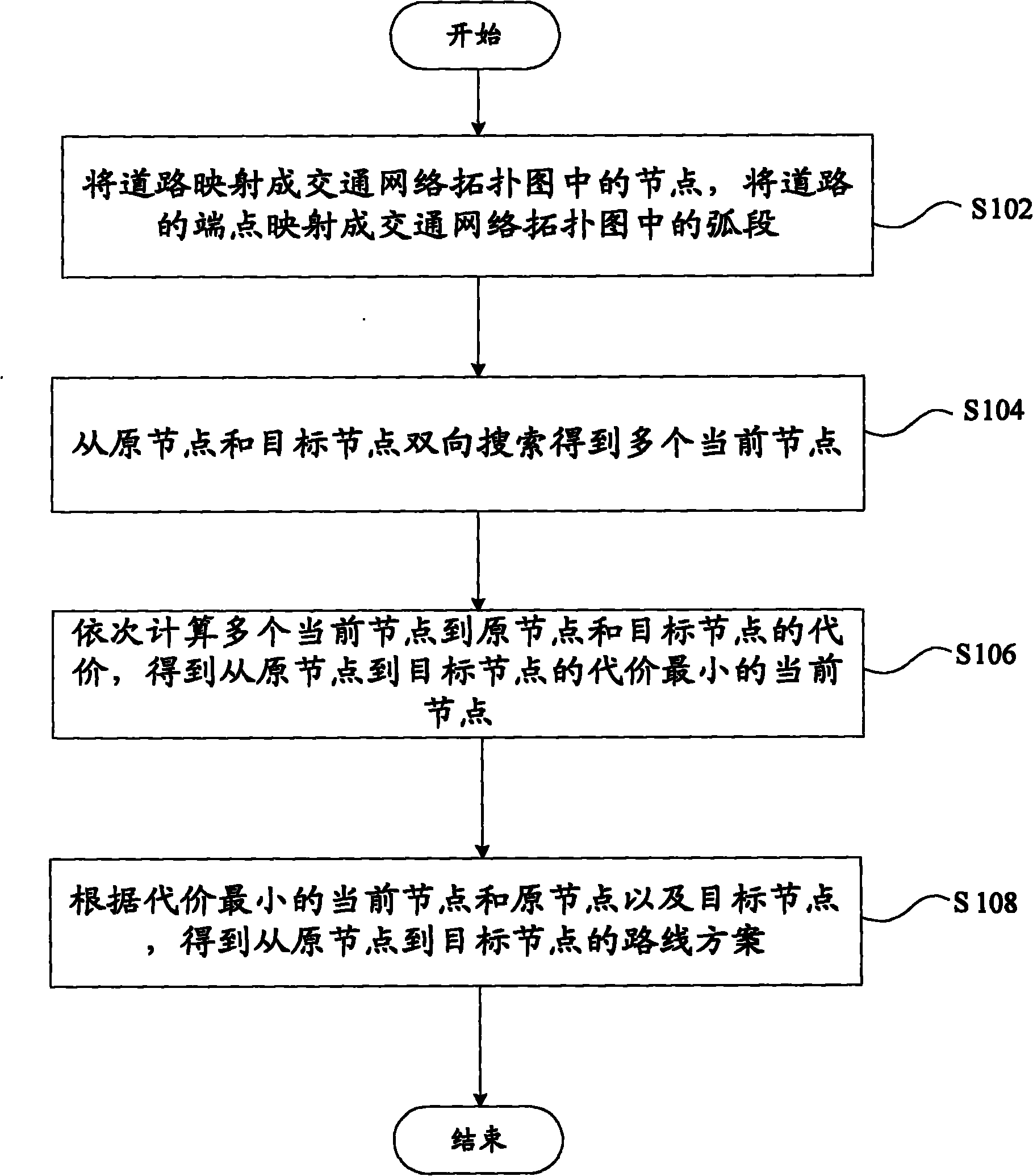
[0044] figure 1 A flow chart of a path planning method according to an embodiment of the present invention is shown, including the following steps:
[0045] S102, mapping roads into nodes in the traffic network topology map, and mapping road endpoints into arcs in the traffic network topology map;
[0046] S104, obtaining a plurality of current nodes through a two-way search from the original node and the target node;
[0047] S106, sequentially calculate the cost from multiple current nodes to the original node and the target node, and obtain the current node with the smallest cost from the original node to the target node;
[0048] S108. Obtain a route scheme from the original node to the target node according to the current node with the smallest cost, the original node, and the target node.
[0049] In this embodiment, by adop...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More