

Smooth path planning method for mobile robots based on dynamic complex environment
A mobile robot and complex environment technology, applied in the direction of instruments, non-electric variable control, two-dimensional position/channel control, etc., can solve the problems of uneven paths and low search efficiency, and achieve the effect of solving deadlock problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 2
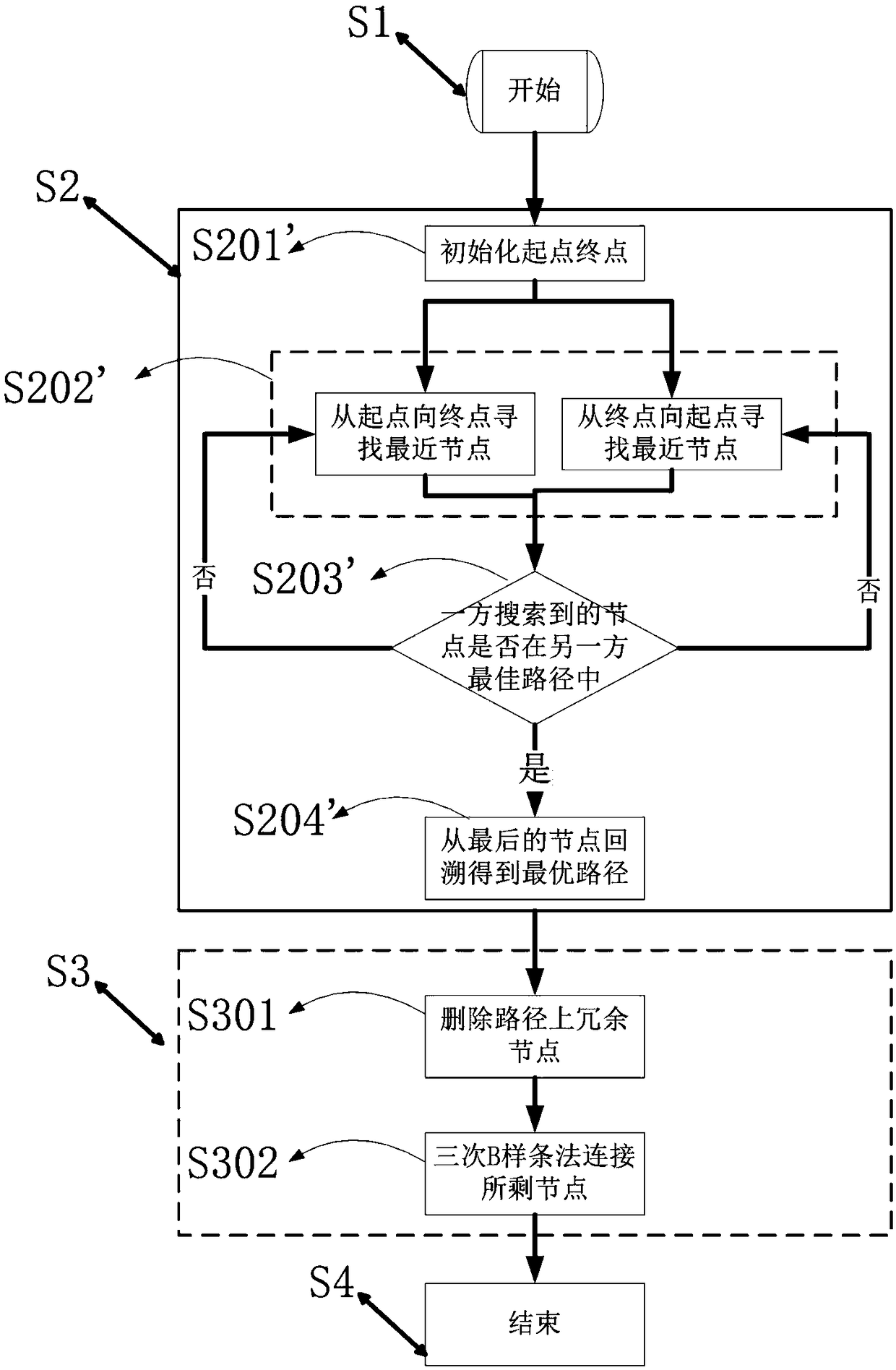
[0102] Different from Embodiment 1, step S2 in this embodiment uses the bidirectional A* algorithm after the improved heuristic function to search for the optimal path to find the optimal path. Please refer to image 3 as shown, image 3 In order to use the two-way A* algorithm after the improved heuristic function for smooth path planning flow chart, the specific steps are as follows:
[0103] S201' initializes the start point and the end point, and lists the start point and the end point in two openlists respectively;
[0104] S202' set out from the starting point and the end point to search for the nearest node respectively;
[0105] S203'judging whether the node searched by one party exists in the best path of the other party, if yes, continue to execute step S204; otherwise return to S202;
[0106] S204' backtracking from the last node to the starting point and the end point respectively, to obtain the optimal path;
[0107] In the step S202', the search for the neares...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More