

Danger rescue and pipe parallel robot
A robot and parallel technology, applied in manipulators, life-saving equipment, respiratory protection containers, etc., can solve the problems of insufficient traction ability of long-distance sealed pipelines, poor crawling ability of pipeline robots, and poor direct rescue ability, and achieve dredging and obstacle removal. The effect of strong ability, strong digging and rescue ability, and fast crawling speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
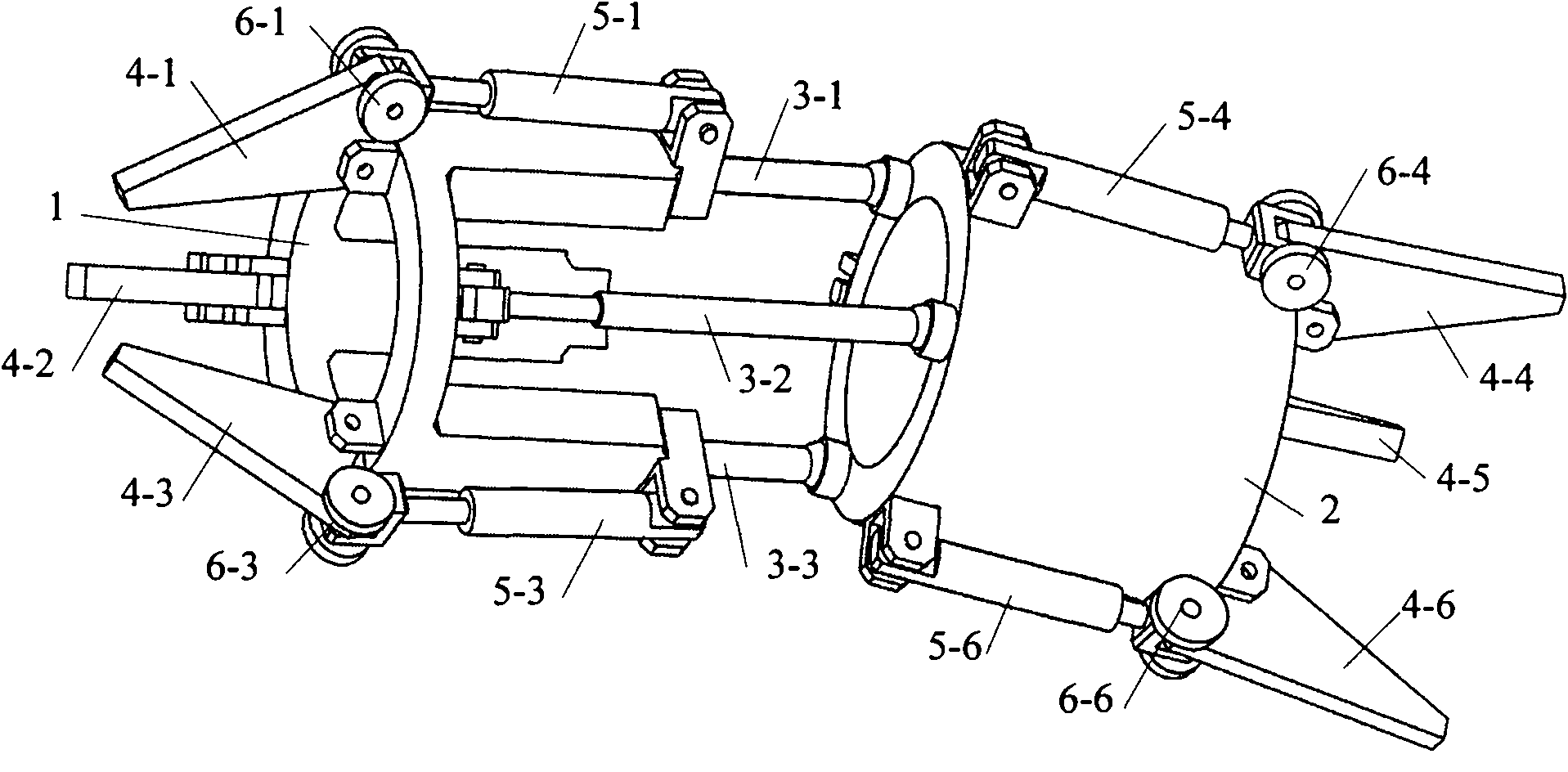
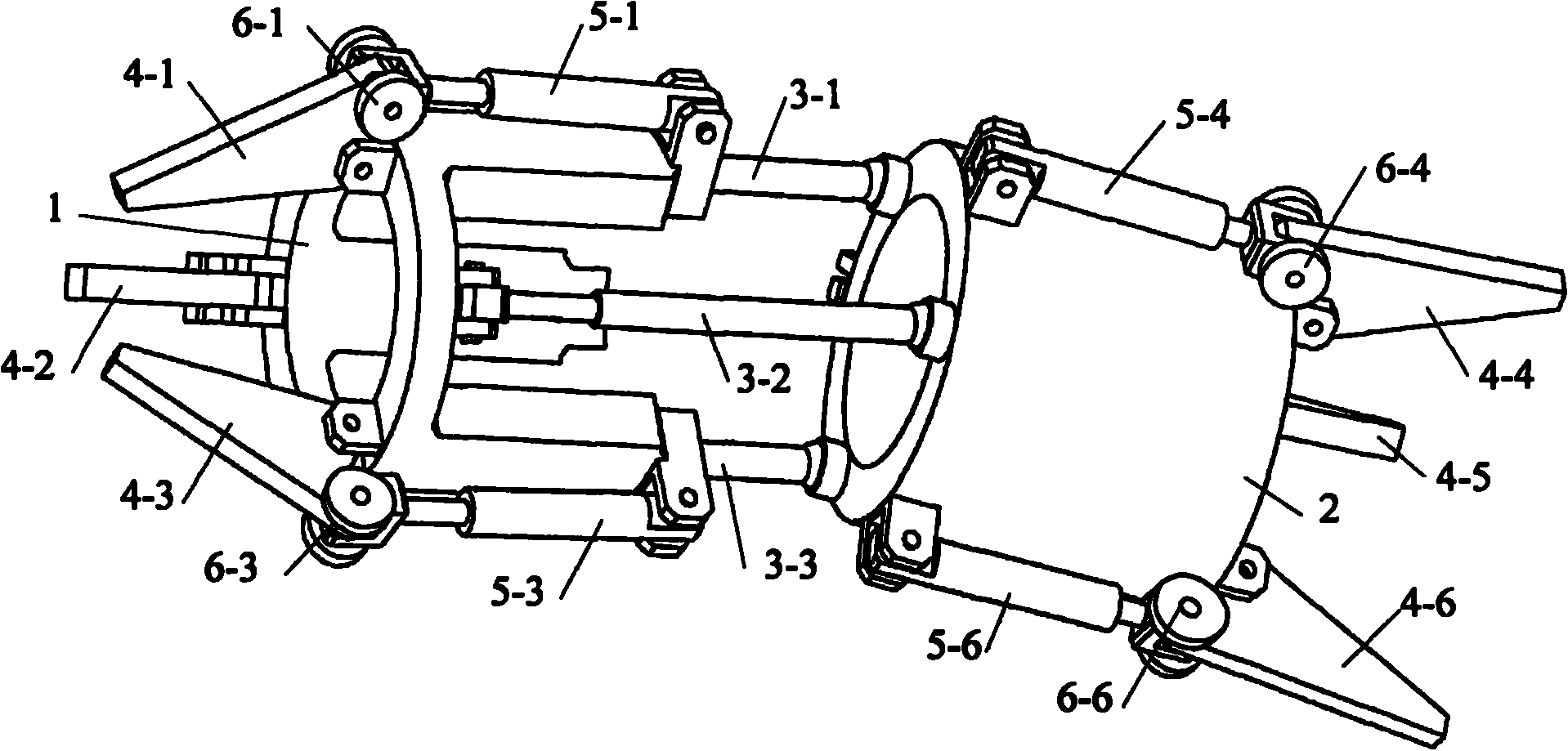
[0017] figure 1 It is an embodiment disclosed by the present invention. The emergency rescue and pipeline parallel robot includes a 3-DOF parallel waist mechanism, a hand operating device, a foot operating device, and a monitoring and driving control system. The monitor is fixed on the hand operating device. Front bracket 1, where:
[0018] The 3-DOF parallel waist mechanism is composed of a front bracket 1, a rear bracket 2, three retractable first main drive rods 3-1, a second main drive rod 3-2 and a third main drive rod 3-3, One end of the above-mentioned three main driving rods is connected with the rotating pair of the front bracket 1, and the other end is connected with the rear bracket 2 spherical hinges.
[0019] The hand-operated device includes a front support 1 and a group of front swing link mechanisms, and the front swing link mechanism consists of a front support 1, a first swing link 4-1, a second swing link 4-2, and a third swing link 4- 3. Three retractable...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More