

Method for tracking multiple targets under unknown measurement noise distribution
An unknown measurement noise, multi-target tracking technology, applied in the field of target tracking, can solve the problems of reduced algorithm tracking performance, difficult-to-measure noise, affecting the speed of tracking, etc., saving computing time, high robustness and stability, and improving The effect of tracking speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
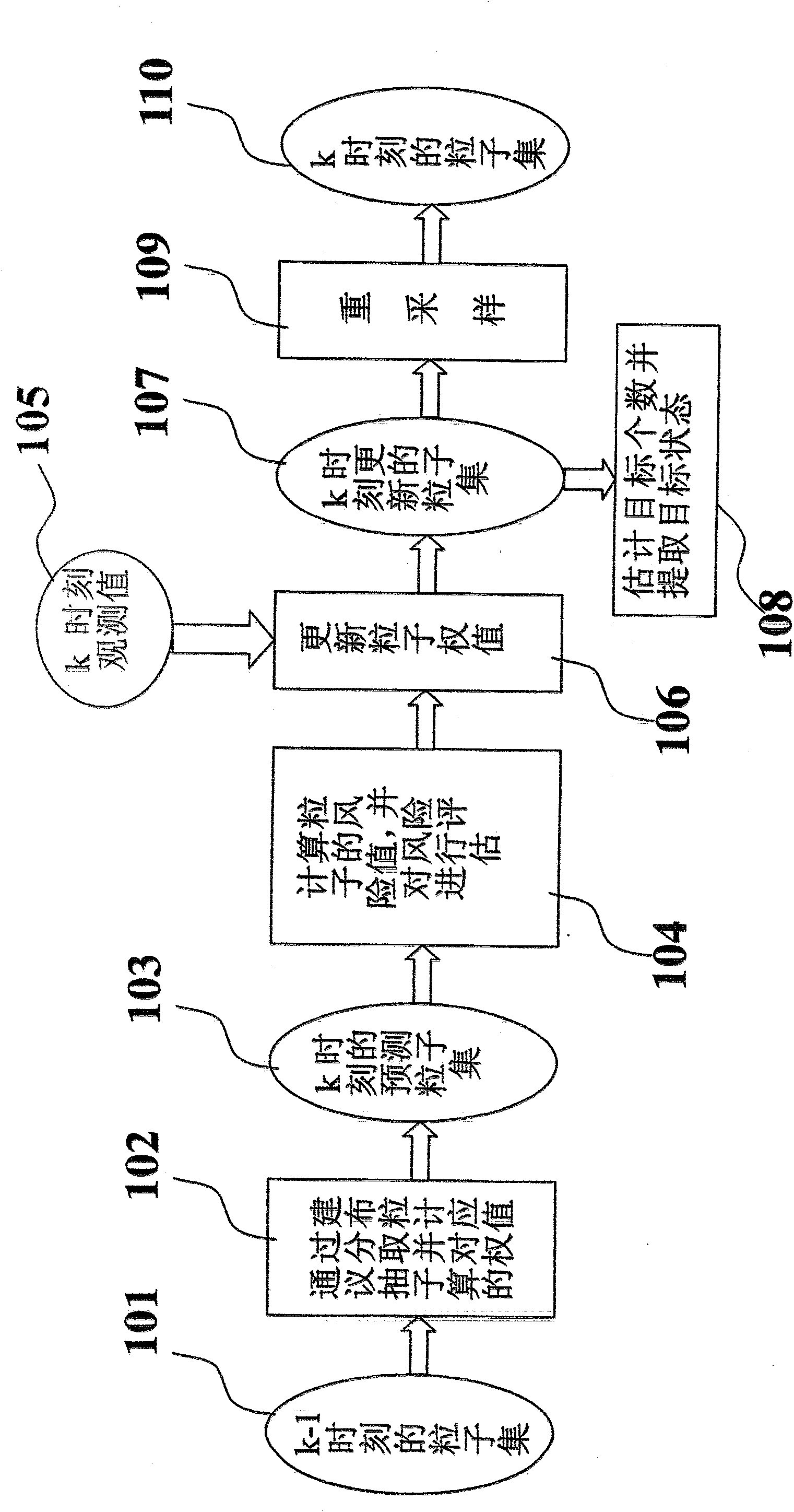
[0032] like figure 1 As shown, assuming that step 101 has been tracked, the state particle set at time k-1 is obtained as Then one-step target tracking requires 102 steps:
[0033] For the particle set at the previous moment (k-1), according to the formula (1) from the proposed distribution q k (·|x k-1 (i) ,Z k ) and p k (·|Z k Randomly select particles in ):
[0034] x ~ k ( i ) ~ q k ( · | x k - 1 ( i ) , ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More