

Suspended line walking robot
A line-following robot and suspension-type technology, applied in the field of robotics, can solve problems such as complex mechanisms and achieve high safety factors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The present invention is described in further detail below in conjunction with accompanying drawing:
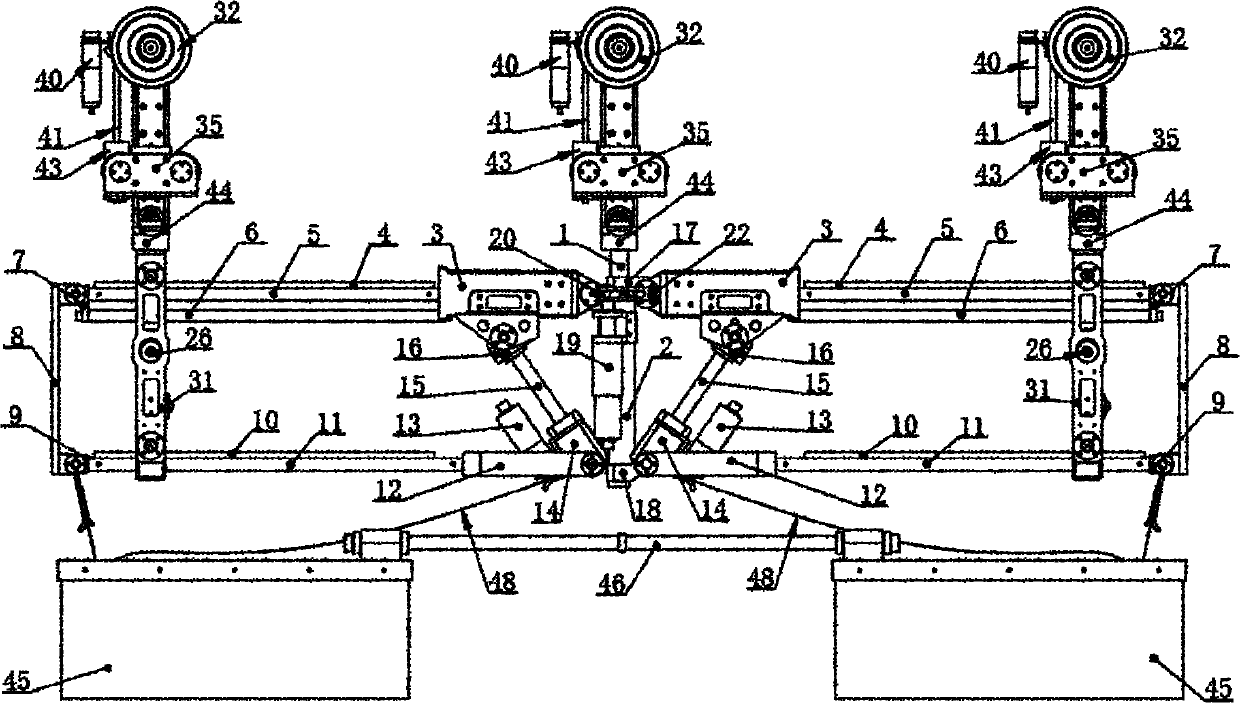
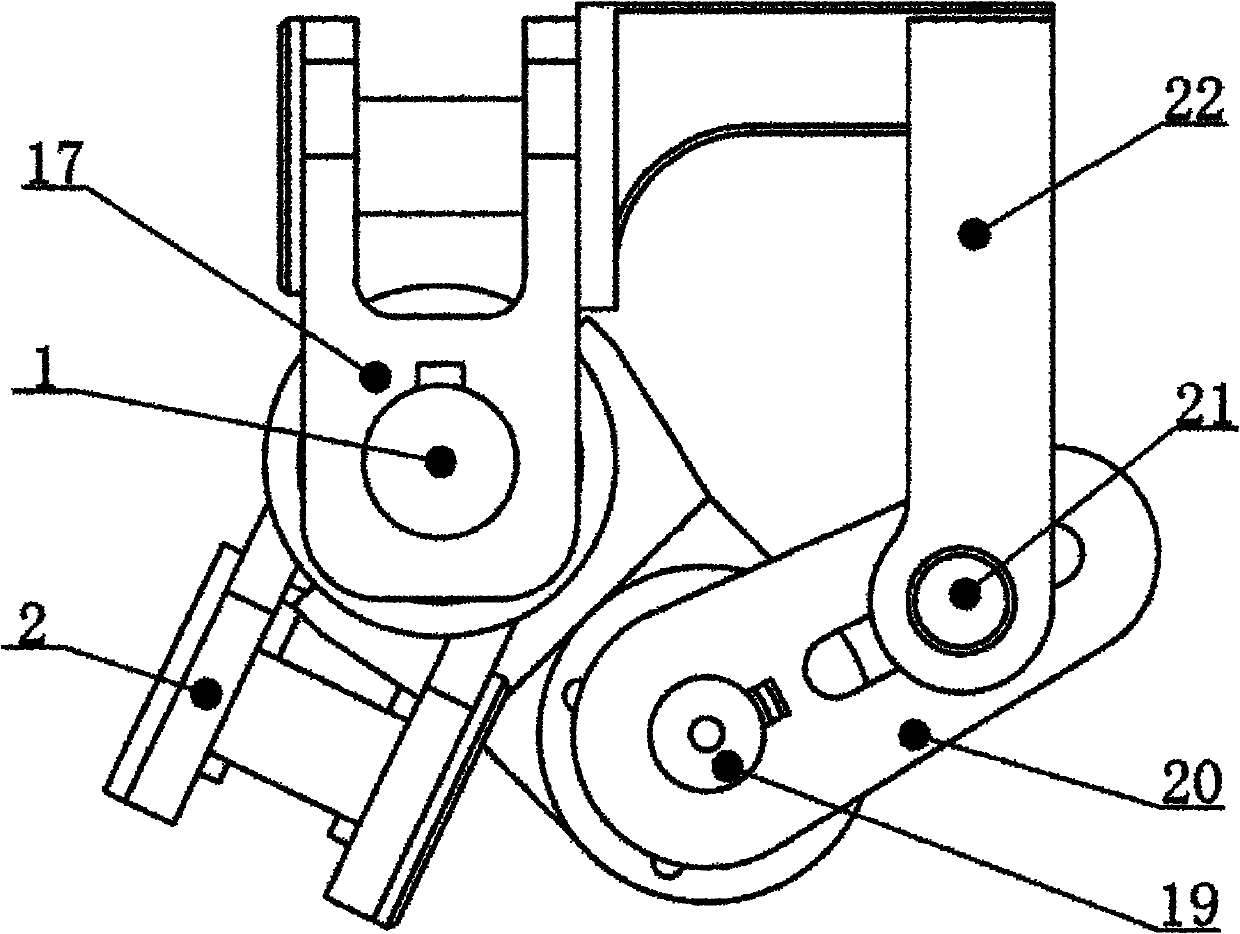
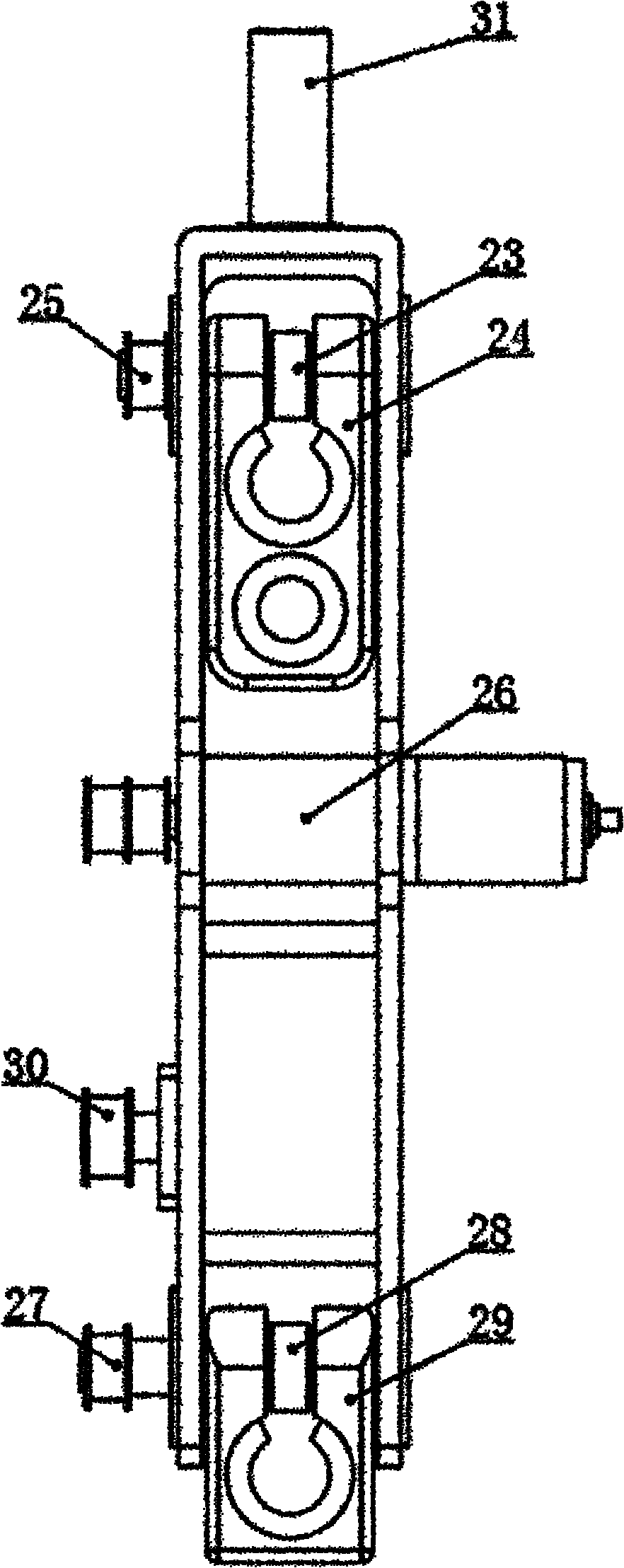
[0034] Such as figure 1 As shown, the present invention proposes a two-segment suspension line inspection robot mechanism. The mechanism includes two parts: a walking mechanism and a pod. The running mechanism and the pod are connected by a steel belt 48 . The walking mechanism consists of a two-section trunk and three driving claws. The two-section torso forms a double parallelogram structure to ensure that the three drive wheel claws face the same direction. 5 motors on the torso (respectively 2 vertical swing motors 13, 2 telescopic motors 26, and 1 yaw motor 19) drive each section of the trunk vertical swing, horizontal swing and telescopic, so that each obstacle-crossing driving wheel can realize Three degrees of freedom translation up and down the line. As shown in Figure 4, each driving wheel claw includes a driving wheel and a clamping device. The motor driv...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More