

Two-rotational degree-of-freedom parallel mechanism for imaginary axis machine tool and robot
A technology of robot and degree of freedom, which is applied in the direction of manipulators, program-controlled manipulators, metal processing machinery parts, etc., can solve the problems of inconvenient control, low motion precision, complex structure, etc., and achieve simple control, small moment of inertia, and fast motion response Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The present invention will be further explained below in conjunction with specific embodiments. The drawings show a preferred embodiment of the present invention, and the technical solution of the present invention is not limited to this embodiment.
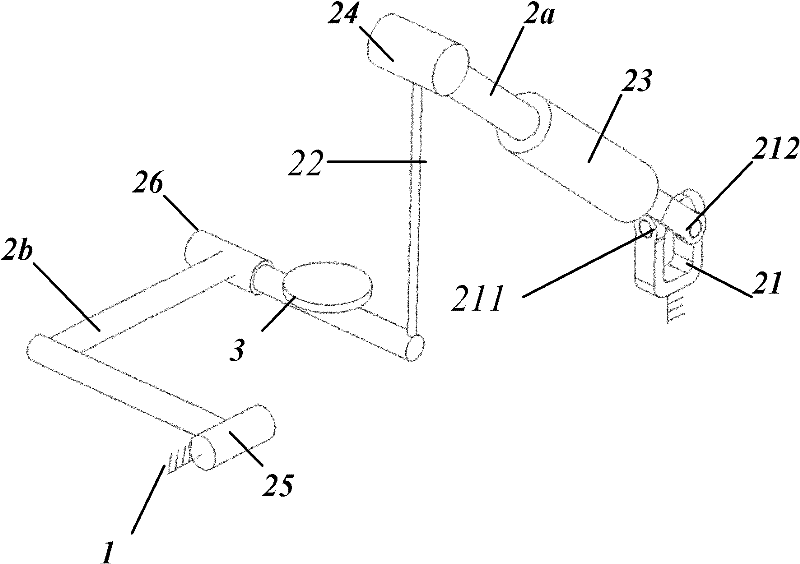
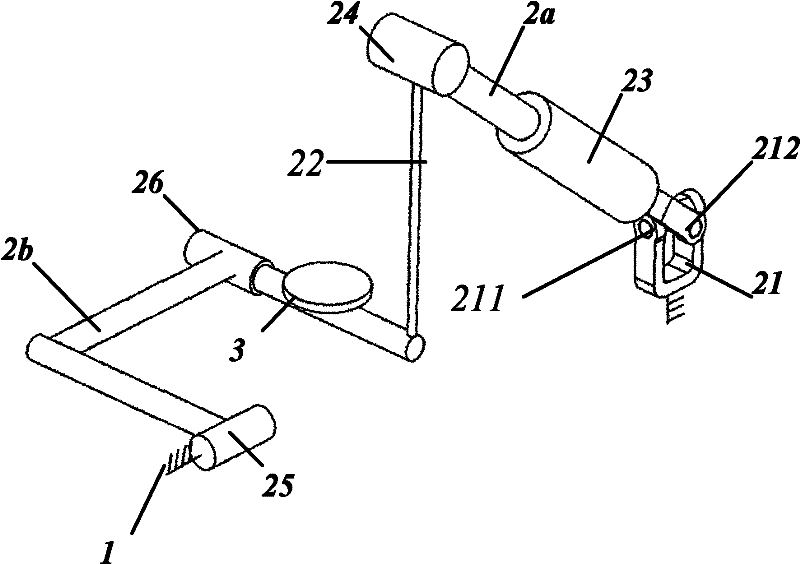
[0018] See figure 1 , The present invention is a two-degree-of-rotation parallel mechanism for virtual-axis machine tools and robots, including a static platform 1, a moving platform 3, and a first movement branch chain 2a and a second movement branch connected between the static platform and the moving platform. Chain 2b.
[0019] The first kinematic branch 2a includes a universal hinge 21, a moving pair 23, and a first rotating pair 24 connected in sequence; the universal hinge 21 is also connected to the static platform 1, and the first rotating pair 24 is also connected to the moving platform 3 through a connecting rod 22 In the first movement branch 2a, the axis of the first rotating pair 24 is parallel to the second rot...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More