

Humanoid dexterous hand with variable-shape palm
A dexterous hand and palm technology, applied in the field of human-like dexterous hands, can solve the problems of restricting dexterity and restricting mutual cooperation of fingers, and achieves the effect of reducing weight, large application potential, and improving operation space.
Inactive Publication Date: 2011-06-15
TIANJIN UNIV
View PDF4 Cites 25 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
The angle between the different fingers is fixed, which limits the dexterity of some hands
In particular, the mechanism of the fingers usually uses three parallel rotating pairs to complete the grasping action. Each finger usually operates in one plane, and the rigid palm fixes the angle between the planes of the fingers, thus limiting the interaction between the fingers. ability to collaborate
Therefore, it is difficult for the humanoid manipulators designed in the past to make corresponding adjustments to achieve different grasping strategies according to the different geometric shapes of the grasped objects.
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Embodiment Construction
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
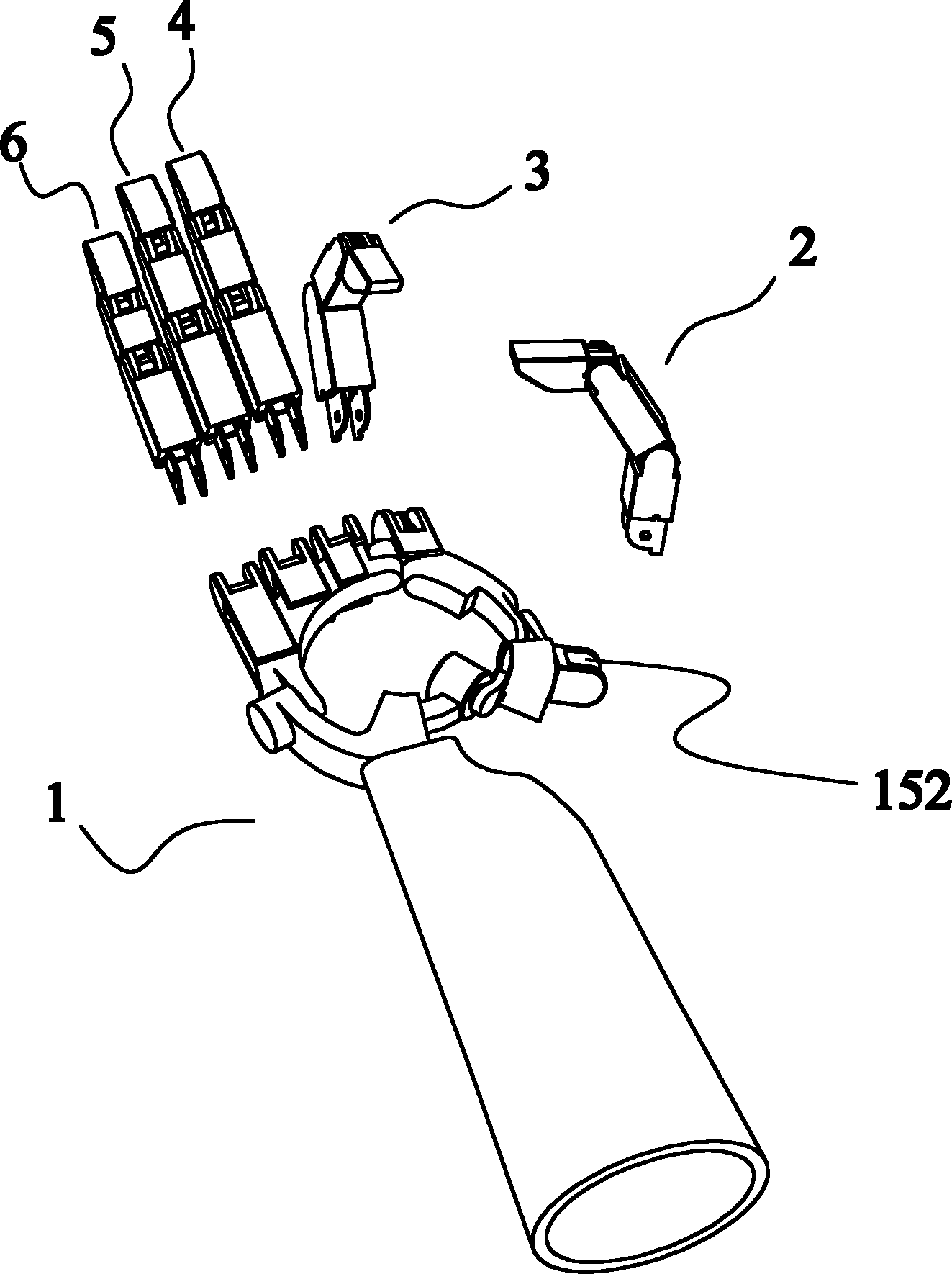
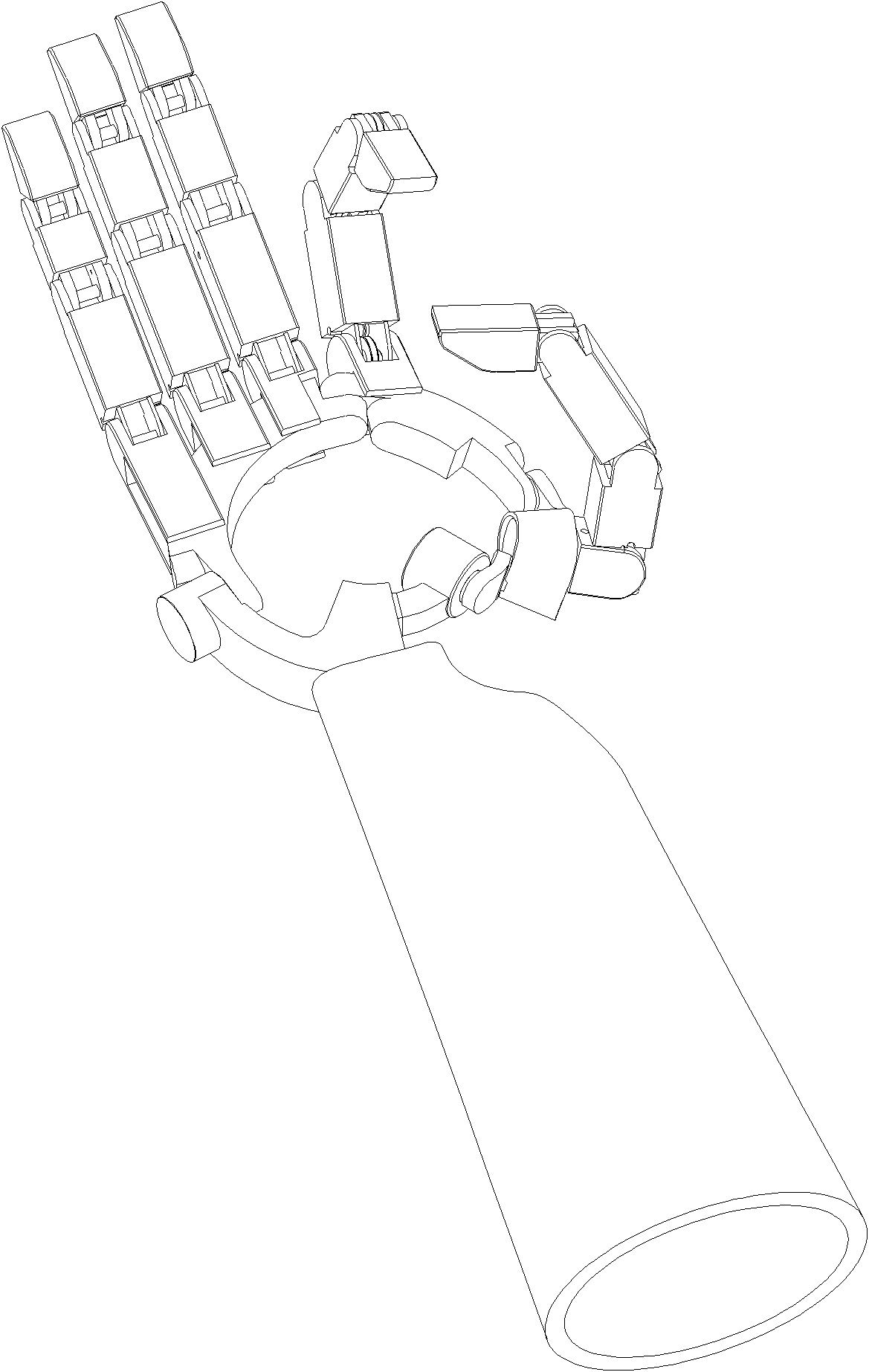
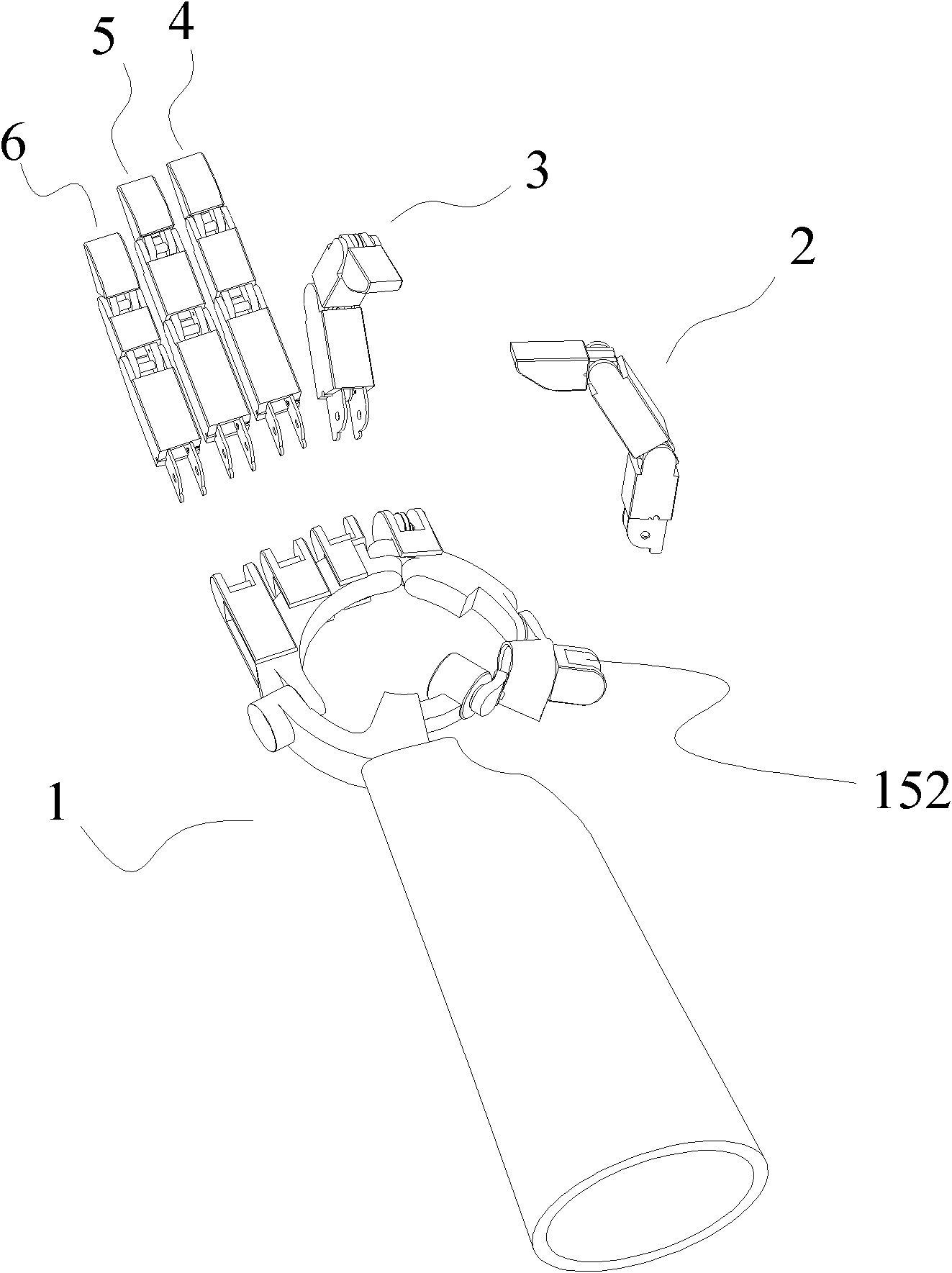
The invention discloses a humanoid dexterous hand with a variable-shape palm, which comprises the palm and three-five fingers connected with the palm, wherein the palm is constituted by a closed spherical five-connecting rod mechanism formed by sequentially connecting a palm arm connecting rod, a palm connecting rod I, a palm connecting rod II, a palm connecting rod III and a palm connecting rod IV; and each finger comprises a finger base, a finger base connecting rod, a finger intermediate connecting rod and a finger tail end, in each finger, the adjacent ends of the finger intermediate connecting rod and the finger tail end are sequentially connected by rotation through a rotating shaft, the finger base is fixedly connected on the connecting rod for constituting the palm, three rotatingshafts on each finger are connected with a rotary driving device, and the finger base connecting rod, the finger intermediate connecting rod and the finger tail end can rotate around the respective rotating shaft lines of the three rotating shafts under the drive of the rotary driving device. The humanoid dexterous hand comprises the palm in variable degrees of freedom and shapes; furthermore, the structure is simple and the volume is small.
Description
Humanoid dexterous hand with morphable palm technical field The invention relates to a humanoid dexterous hand, in particular to a humanoid dexterous hand with a variable-shaped palm. Background technique In the past 30 years, since the emergence of robotic hands, it has greatly made up for the shortcomings of traditional end effectors. Typical robot hand designs include 3-finger Stanford / JPL manipulators, 4-finger Utah / MIT manipulators, and 5-finger Belgrade / USC manipulators. In addition, the appearance of humanoid manipulators such as i-Limb, SmartHand, DARPA humanoid hand, DLR / HIT humanoid hand, and Shadow humanoid hand not only increases the operability in different working environments, but also strengthens the fine adjustment of the grasped object. Ability. Studies have shown that for a robotic hand with rigid fingers, a theoretical degree of freedom of at least 9 is required for dexterity. A typical dexterous hand usually uses a structure with 2 or 3 revolving pa...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More Patent Type & AuthorityApplications(China)
IPC IPC(8): B25J15/08B25J13/00
CPCB25J15/0009
Inventor戴建生魏国武王树新罗海风李建民罗振军
OwnerTIANJIN UNIV