

Method and device for timing shift estimation
A technology of timing offset estimation and timing offset, which is applied in the field of communication, can solve the problems of large number of IDFT points and high computational complexity, and achieve the effect of reducing complexity and avoiding a large number of zero padding
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
example 1
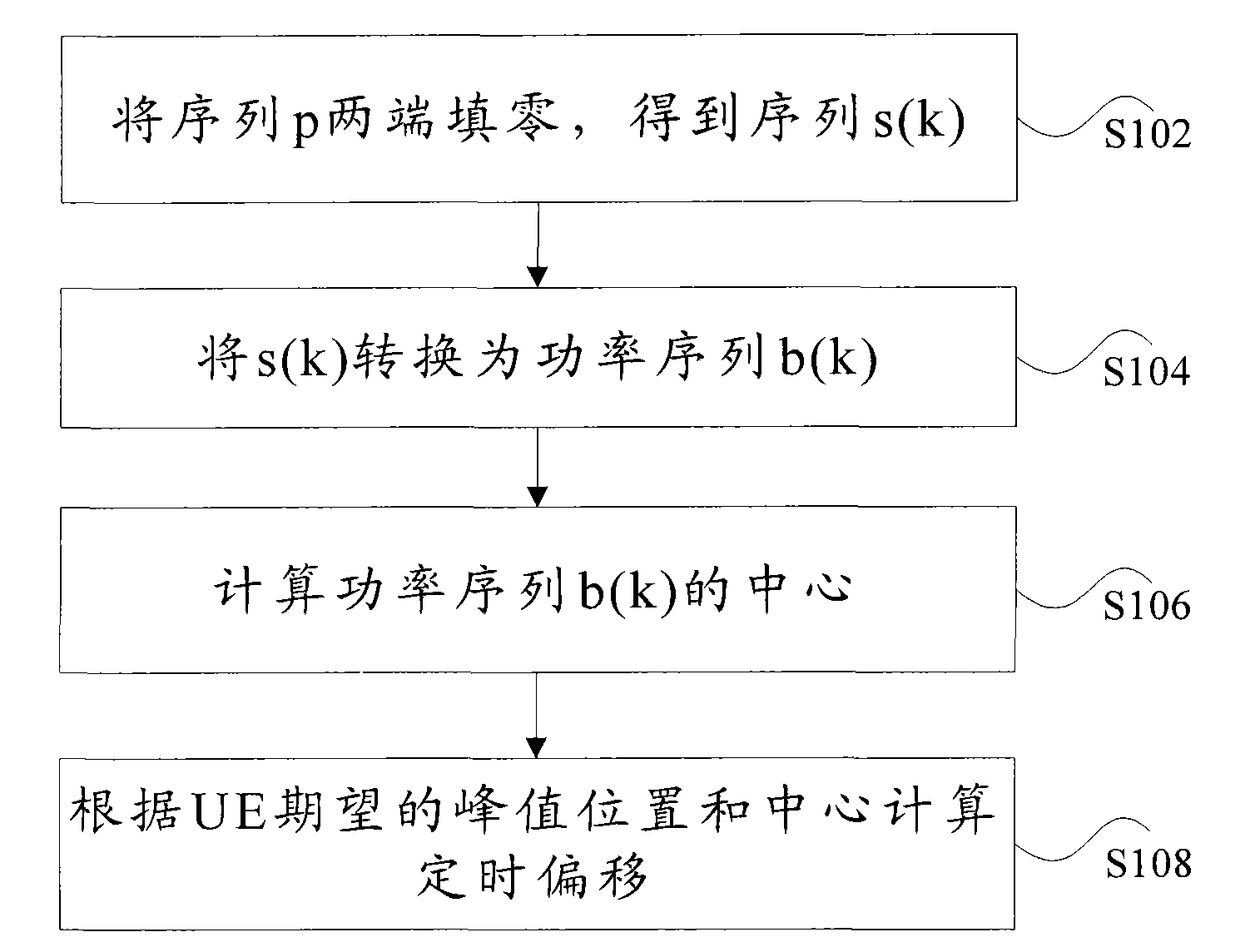
[0038] In the following, the predetermined channel is PRACH as an example, and the above timing offset estimation method is described in detail through specific examples.
[0039] Perform zero-fill operation on the sequence p with a length of 839 to obtain a sequence s(k) with a length of 864. After performing IDFT transformation on the sequence s(k) with 864 points, the obtained time domain signal is g(k). Calculate Its power value is 5, 22, 50, 30, 15, 0, 0, ... in turn.
[0040] Comparing the various power values, the position where the maximum value appears is w=2.
[0041] The window length is taken as K=2, then the position of the center of gravity is (5*0+22*1+50*2+30*3+15*4) / (5+22+50+30+15)=2.2295.
[0042] The expected peak position of the UE is 0, then the timing offset is TA=(0-2.2295)*24576 / 864=-63.4Ts, and TA=-63 through rounding. If it is considered that the actual TA control command accuracy is a resolution of 16Ts, it can be further processed.
example 2
[0044] This example describes that the coordinates of the left and right windows exceed the range [0, M-1] (ie, w-iM-1) and (d 0 -d w ) is a detailed processing procedure when it exceeds the interval [-M / 2, M / 2].
[0045] For example, the signal power values of 864 points in the time domain are 30, 15, 0, 0, ..., 0, 0, 5, 22, 50 in sequence. Comparing the various power values, the position where the maximum value appears is w=863. If the window length is K=2, then the coordinates of the two points in the right window become 864 and 865. The position of the center of gravity is (5*861+22*862+50*863+30*864+15*865) / (5+22+50+30+15)=863.2295. The expected peak position of the UE is 0, and the offset is 0-863.2295=-863.2295.
[0046] This value is out of the range [-432, 432]. After adjustment, the adjusted offset is -863.2295+864=0.7705, and the timing offset is TA=0.7705*24576 / 864=21.9164Ts. After rounding, we finally get TA=22.
[0047] The timing offset estimation method...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More