

Retrograde-motion preventing system for vehicle
A technology for vehicles and vehicle information, applied in collision avoidance systems, traffic control systems for road vehicles, traffic control systems, etc., to solve problems such as warning delays
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0071] The premise of Embodiment 1 is as follows: for the exit road in the parking area, as a one-way attribute, the driving direction is given (hereinafter, the driving direction of the exit road is called the exit road link), and the system does not recognize (do not store) The road information related to the inner peripheral road which is the road in the other parking area. In addition, the summary of this embodiment is to predict whether there is a possibility of going against the direction of the inner peripheral road in the parking area by using the exit road link direction of the exit road before the ego vehicle reaches the exit road in the parking area, and Be warned ASAP.
[0072] In Embodiment 1, first, the operation until the own vehicle enters SA / PA from the main line of the motor vehicle-only road and exits from SA / PA will be described.
[0073] (action until entering SA / PA and exiting SA / PA)
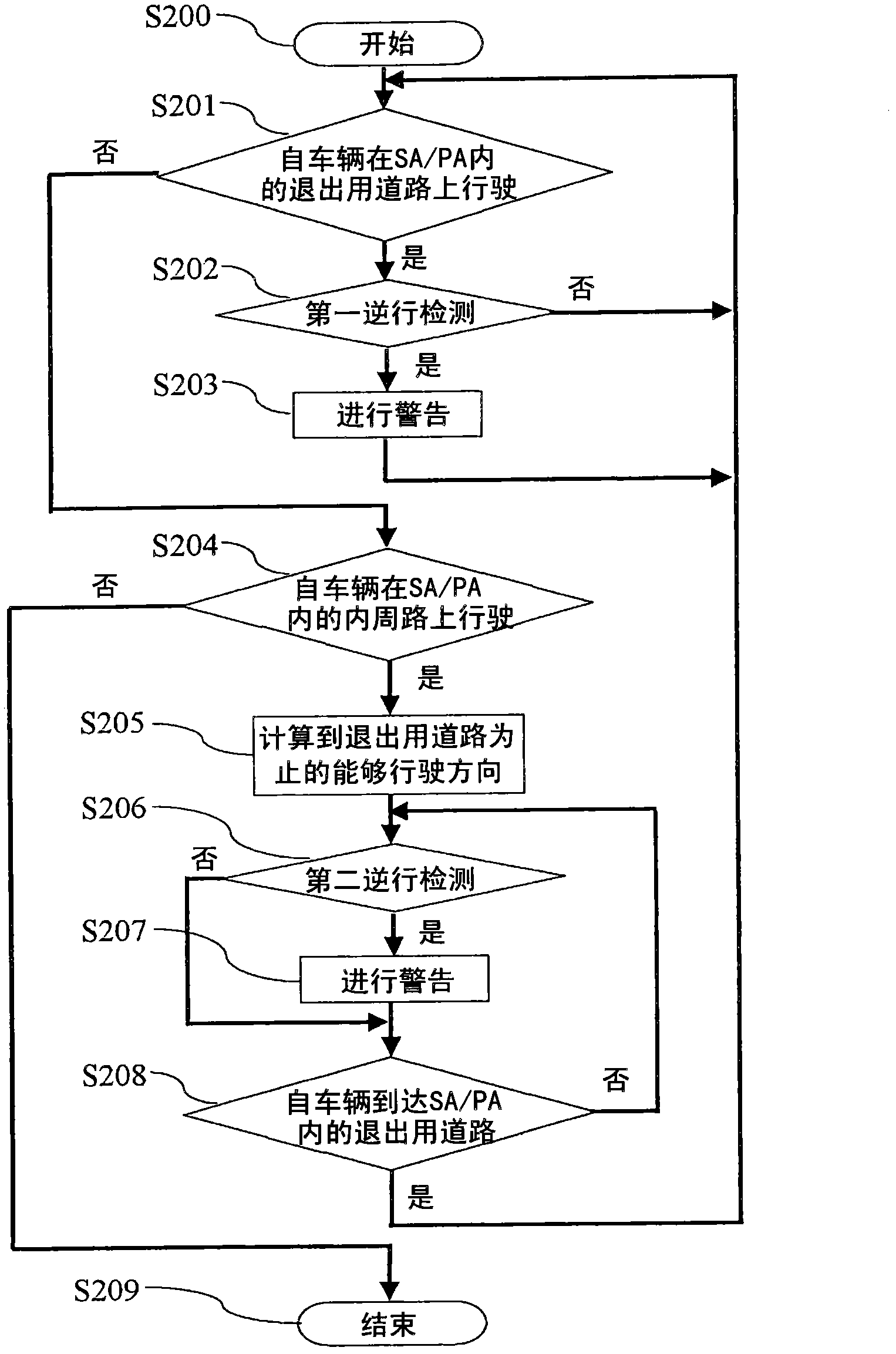
[0074] figure 2 It is an operation flow chart for notification bas...
Embodiment 2
[0117] In Embodiment 1, it is only possible to reach the travelable route of the exit road from the inner peripheral road in the parking area based on the exit road link direction of the exit road. That is, the calculated travelable route does not necessarily coincide with the road in the parking area where the own vehicle actually travels. use Figure 10 The above-mentioned case will be specifically described. exist Figure 10 Among them, 100 represents the loop existing in SA / PA. A solid line 101 represents a travelable route that can reach the exit road 33 c from the current position of the own vehicle 34 calculated in the first embodiment. A dotted line 102 indicates an actual inner peripheral road within SA / PA that can go around the loop 100 from the current position of the own vehicle 34 to the exit road 33c. Here, since the structure in SA / PA is not taken into consideration in the first embodiment, the travelable route 101 is calculated to be passable on the loop 10...
Embodiment 3
[0127] In Embodiment 1 and Embodiment 2, the description has been made on the premise that the system does not store road information on inner peripheral roads in the parking area. Here, when road information including inner peripheral roads and inner peripheral road link directions in the parking area is organized in the future, it is possible to calculate a travelable route based on the organized road information. However, it takes a certain period of time for the road information in the parking area to be completely organized. Even if the location information such as the longitude and latitude of the inner peripheral road is sorted, the information related to the link direction of the inner peripheral road is not necessarily sorted. Therefore, in the third embodiment, the inner peripheral road and the inner peripheral road link direction in the parking area are obtained from the outside, and a travelable route is calculated based on the obtained road information.
[0128] I...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More