

Gait rehabilitation training robot control system
A rehabilitation robot and rehabilitation training technology, applied in passive exercise equipment, physical therapy, etc., can solve problems such as single movement mode and lack of goal-oriented training
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
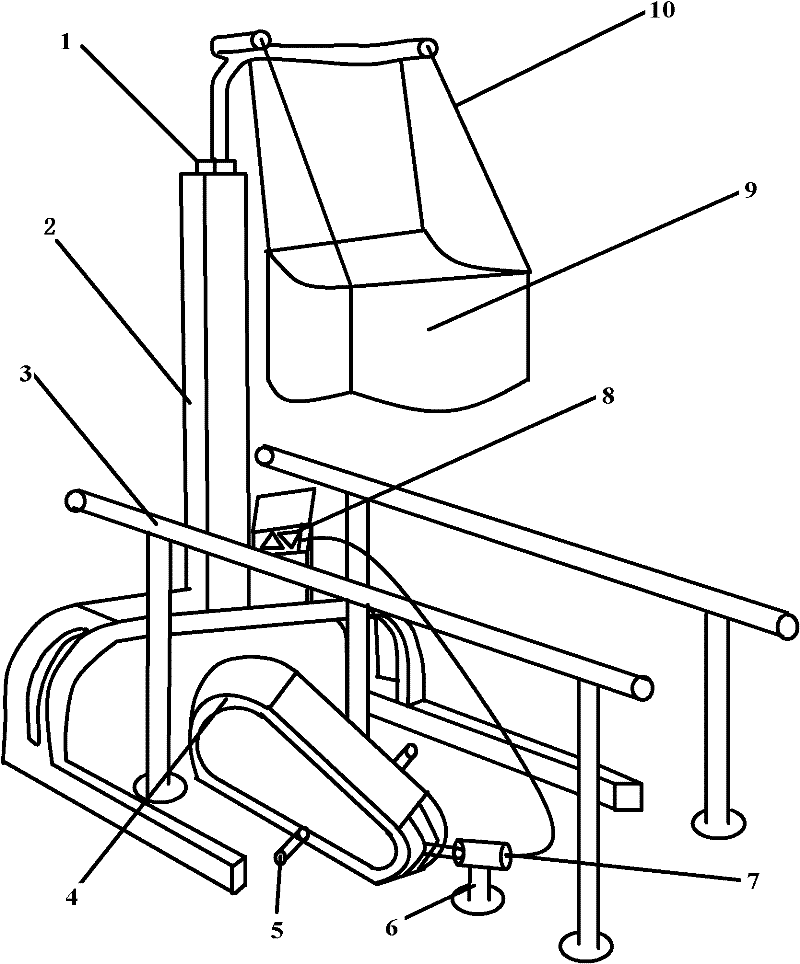
[0022] see figure 1 , the system settings in this embodiment include:
[0023] A weight-reducing device is to set a push rod 1 driven by a lifting motor on the base 2, and hang the load-bearing vest 9 on the push rod 1 through the sling 10; under the load-bearing vest 9, guardrails 3 are respectively arranged on both sides;
[0024] The one-step simulation generator 4 is fixedly installed on the pedal rod 5 with a pair of protective boots worn by the trainer, and the pedal rod 5 operates according to the motion trajectory at a set speed and training mode. bottom pressure sensor;
[0025] A PC is used to control the real-time speed of the gait simulation generator, select different training modes, and drive the push rod 1 to lift by controlling the lifting motor, and the operation of the gait simulation generator is driven by the servo motor 7;
[0026] In specific implementation, the training mode includes:
[0027] Passive rehabilitation training: The trainer independently...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More