

Robot hand grip for packaging and conveying dispersed materials
A technology for handling robots and materials, applied in the direction of transportation and packaging, conveyor objects, etc., can solve the problem of inapplicable grippers, etc., and achieve the effect of wide application, good adaptability, and simple mechanism
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
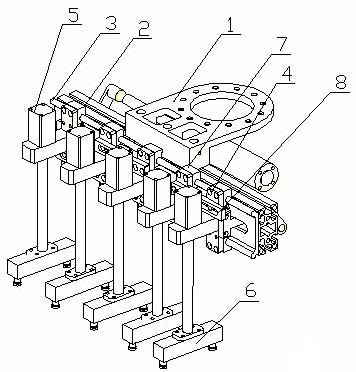
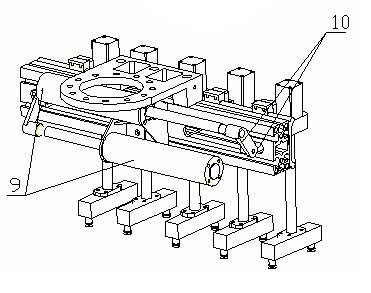
[0022] See figure 1 and figure 2 , taking the gripper of a packaging and handling robot for scattered materials containing 5 sets of small fingers as an example, that is, N=5 in the figure.
[0023] The robot gripper for packaging and transporting scattered materials of the present invention is composed of a platform 1, fingers, a support frame 2, a slide rail 3, a slider 7, a first connecting piece 8 with a limiting groove, a cylinder 9 and a second connecting piece 10.
[0024] The platform 1 is a supporting platform for the gripper and also a connecting platform between the gripper and the manipulator.
[0025] The support frame 2 is fixed on the platform 1 , and the slide rail 3 is fixed on the front of the support frame 2 .
[0026] Each set of fingers described (see image 3 ) includes a small cylinder block 4 with a columnar protrusion, a small cylinder 5 and an execution part 6, the small cylinder 5 is fixed on the small cylinder seat 4 with a columnar protrusion, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More