

A twelve-legged robot and its motion method
A robot and motion technology, applied in the field of robots, can solve problems such as inability to crawl, less degrees of freedom, and inconvenient turning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] Below in conjunction with accompanying drawing and embodiment the invention is described in detail:
[0050] The present invention designs a twelve-legged robot composed of six legs and its motion method. When the bending angle is large, it only needs to stop the moving mechanism and start the moving mechanism that needs to rotate slightly to bend. Turning can realize large-angle turning, and this patent is fixed or adsorbed on the vertical crawling surface through the intermediate movable mechanism, so as to realize vertical crawling.
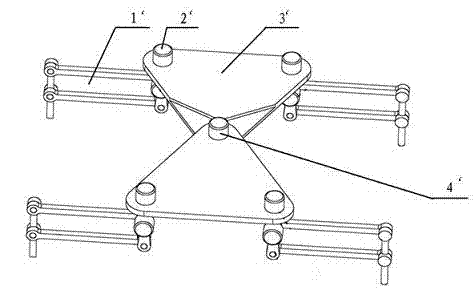
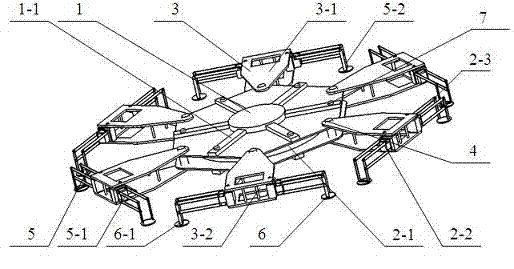
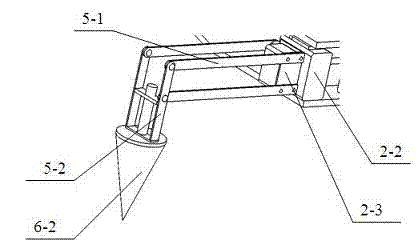
[0051] As a specific embodiment of this patent, the structural schematic diagram is as follows: figure 1 Shown is a twelve-legged robot, including a main body 1, a main servo motor 2-1, a movable servo motor 2-2, a rotating servo motor 2-3, a movable mechanism 3, a leg structure 5 and a foot member 6, The main servo motor 2-1 is arranged in the main body 1, and the main body 1 is provided with a partition plate 1-1, and the partition ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More