

Controllable mechanism type palletizing robot mechanism
A palletizing robot and mechanism-based technology, which is applied in the direction of program-controlled manipulators, manipulators, and object stacking, can solve the problems of unstable movement of palletizing robots, increase the load of robots, and low palletizing accuracy, and achieve good flexibility , Improve work efficiency and reduce the weight of the arm
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] The technical solutions of the present invention will be clearly and completely described below in conjunction with the accompanying drawings and embodiments. Apparently, the embodiments are only a part of the embodiments of the present invention, not all of them. Based on the embodiments of the present invention, all other embodiments obtained by those skilled in the art without creative efforts fall within the protection scope of the present invention.
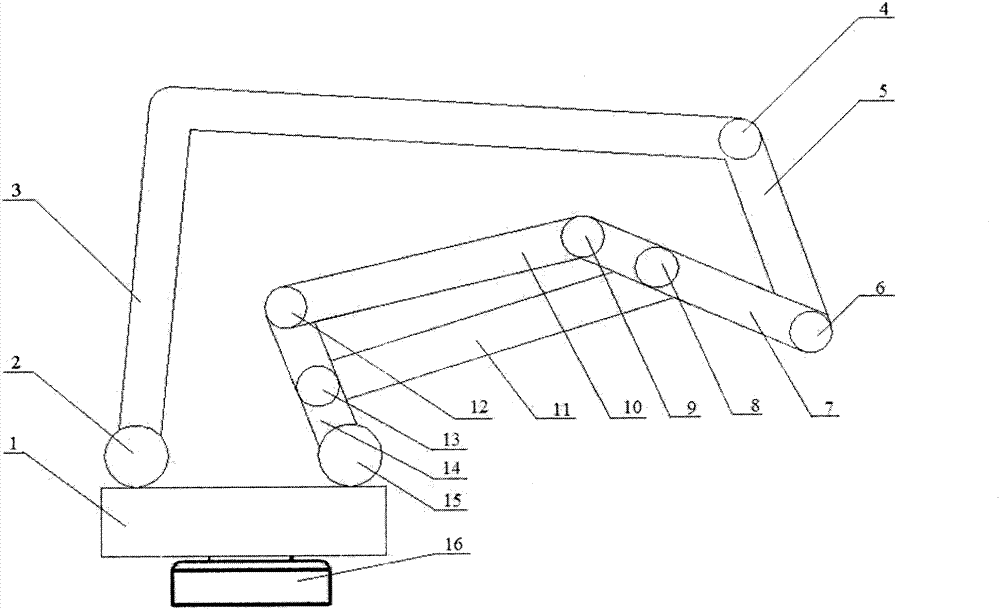
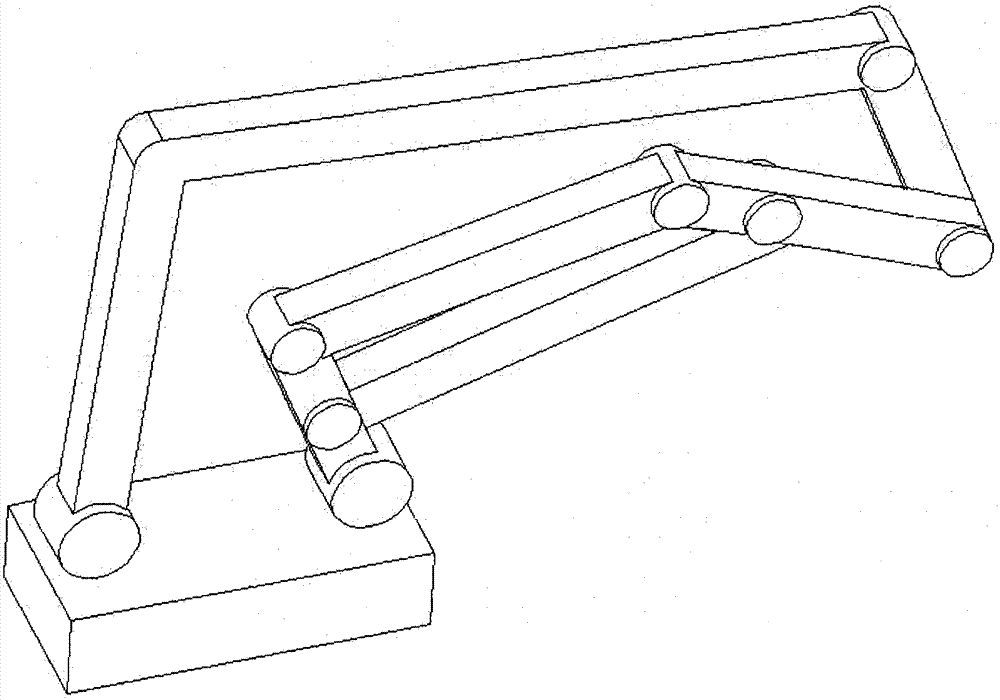
[0015] control figure 1 , a controllable mechanism type palletizing robot, including a rotating base 16, a frame 1, a motor, a palletizing robot arm, and an arm lifting mechanism, the rotating base 16 is a cylinder, and the frame 1 is a square horizontal plate, The axis of the cylinder is perpendicular to the horizontal plate, and the frame 1 can rotate around the axis of the rotating base 16. The motor is composed of a first controllable motor 2 and a second controllable motor 15, and the two controllable motors are ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More