

Tire transfer robot and control method thereof
A technology for handling robots and robots, which is applied in the direction of program-controlled manipulators, manipulators, and manufacturing tools. It can solve the problems of low robot operation efficiency, low programming efficiency, and cumbersome teaching process, and achieve high-efficiency tire handling program planning and movement. The effect of controlling, saving labor costs and improving production efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The present invention provides a tire handling robot and its control method. In order to make the object, technical solution and effect of the present invention clearer and clearer, the present invention will be further described in detail with reference to the accompanying drawings and examples. It should be understood that the specific implementations described here are only used to explain the present invention, not to limit the present invention.
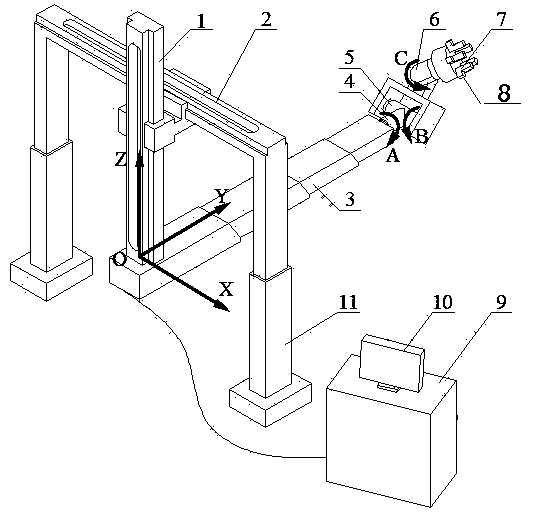
[0039] see figure 1 , which is a schematic structural diagram of the tire handling robot of the present invention. As shown in the figure, the tire handling robot includes: a handling robot body, and the handling robot body is provided with three linear motion mechanisms with the beam of the tire handling robot as the X axis, the forearm as the Y axis, and the cantilever as the Z axis , and the connecting part of the forearm and the tire grabbing device is provided with three terminal rotary motion axes of the first axis...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More