

Flight path fusion method
A track fusion and matrix technology, applied in the field of track fusion, can solve the problems of uncertainty of observation information and performance degradation of correlation fusion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
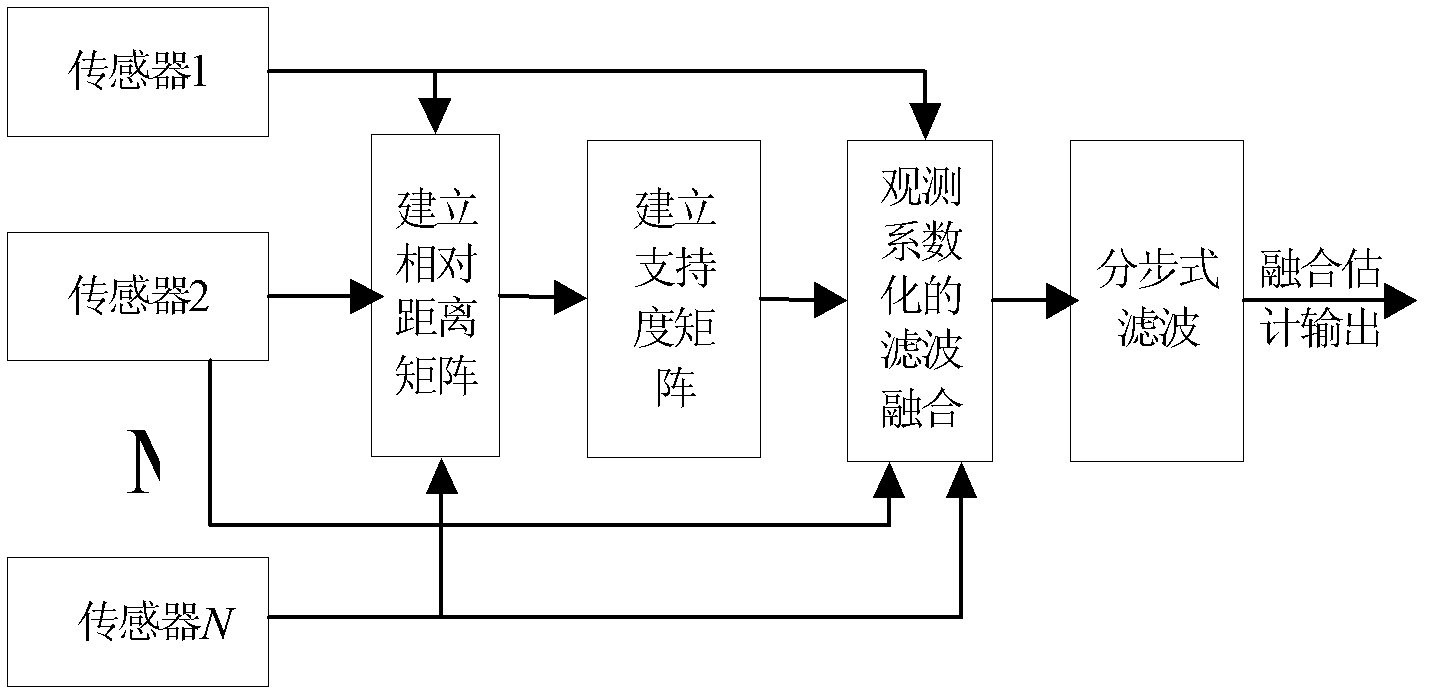
[0053] Such as figure 1 As shown, the track fusion method of the present invention comprises the following steps:
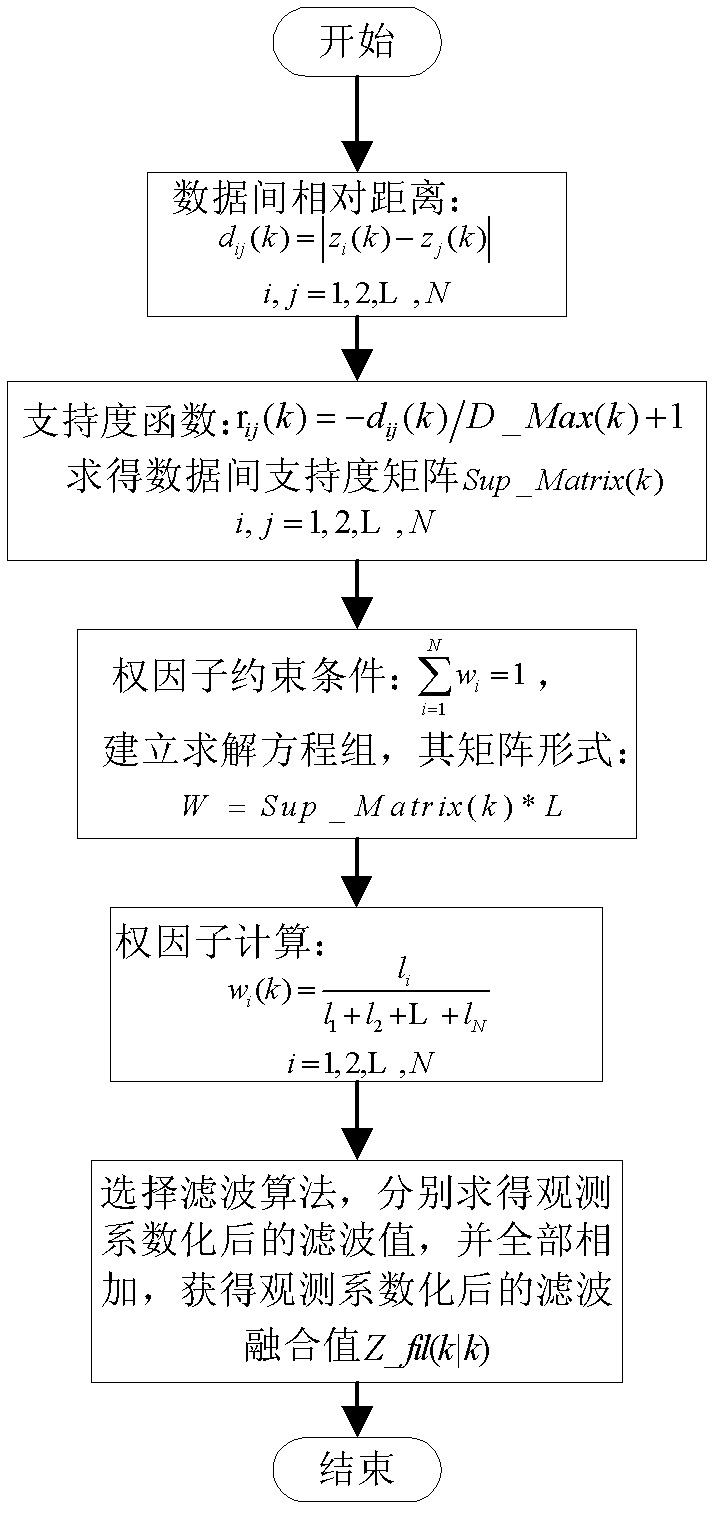
[0054] S1. Using the preprocessed multi-sensor observation information to establish a relative distance matrix between data;
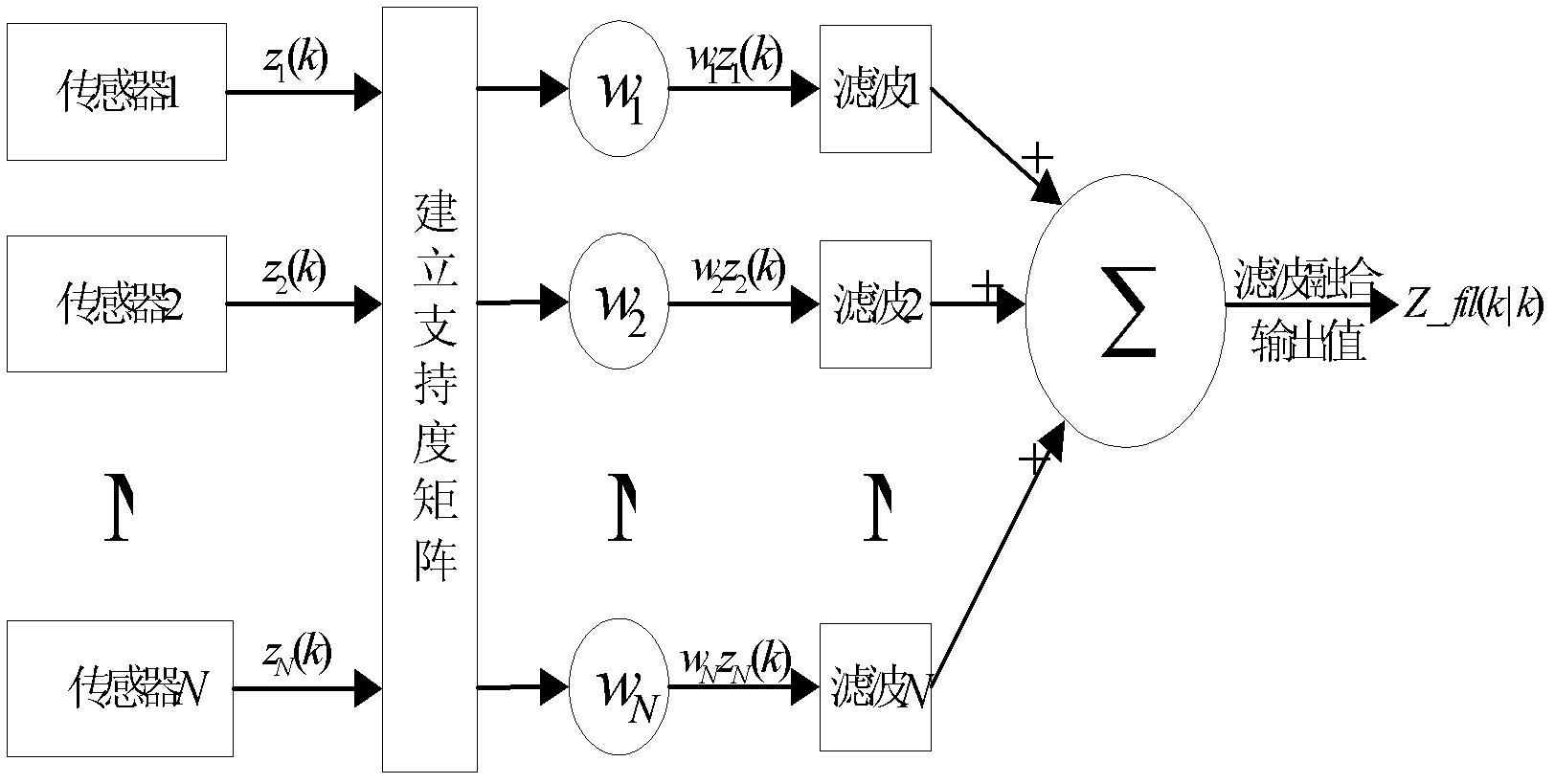
[0055] S2. Calculate the support function according to the relative distance matrix obtained in step S1, obtain the support matrix, establish a system of equations, and solve the weighting factor;
[0056] S3. Multiply the weight factor of each sensor obtained in step S2 with its corresponding observation value, respectively filter to obtain the corresponding filter value, and add all the obtained filter values to obtain the filter fusion value after the observation coefficient;
[0057] S4. Using the filter fusion value obtained in step S3 as the input value of the state update, use the Kalman filter ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More