Open and closed loop mixing correction method of inertia/satellite combination navigation system
An integrated navigation system and satellite navigation technology, which is applied in the field of hybrid open-loop and closed-loop correction of inertial/satellite integrated navigation systems, and can solve problems such as complex calculation process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
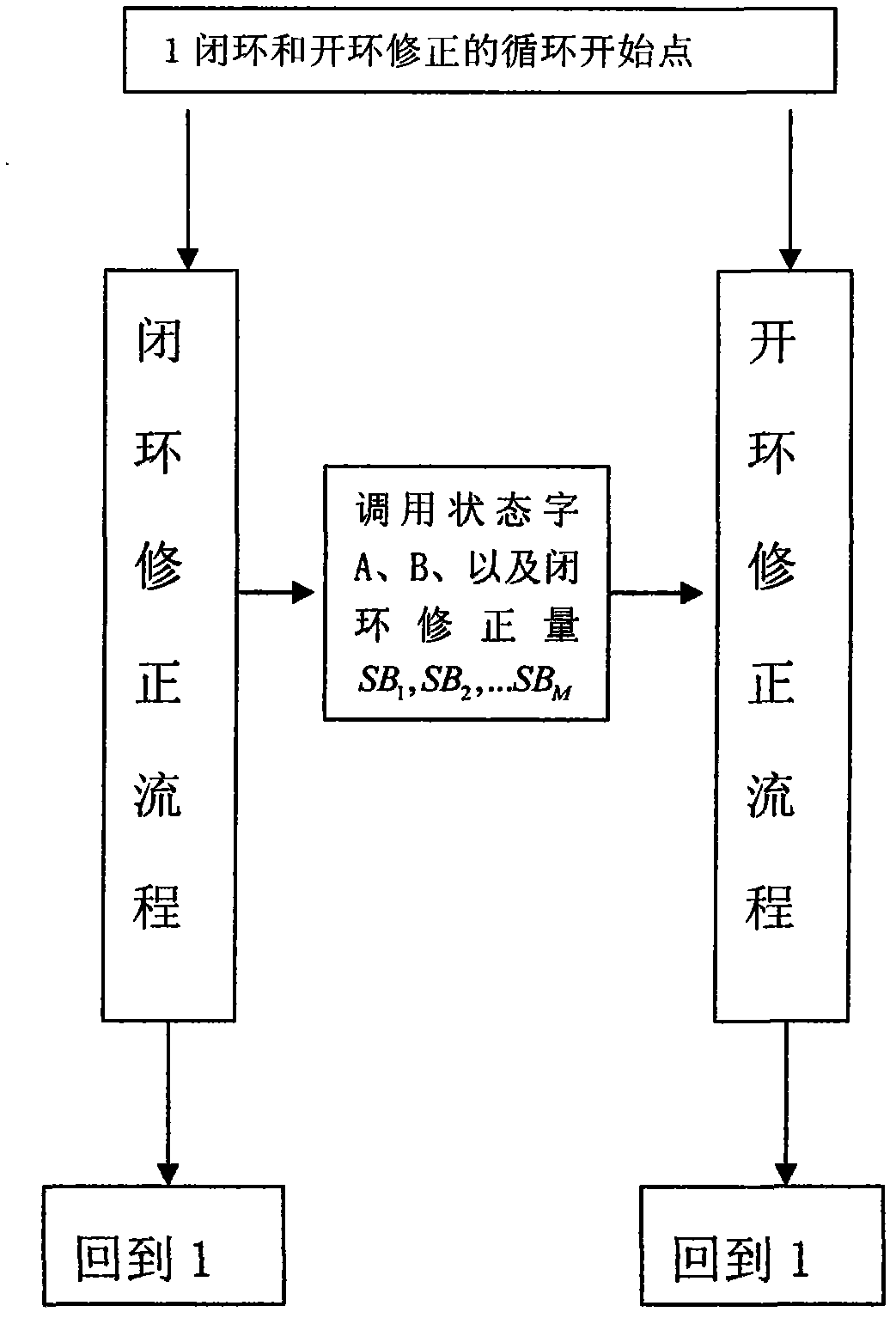
[0146] The following examples can be implemented respectively:
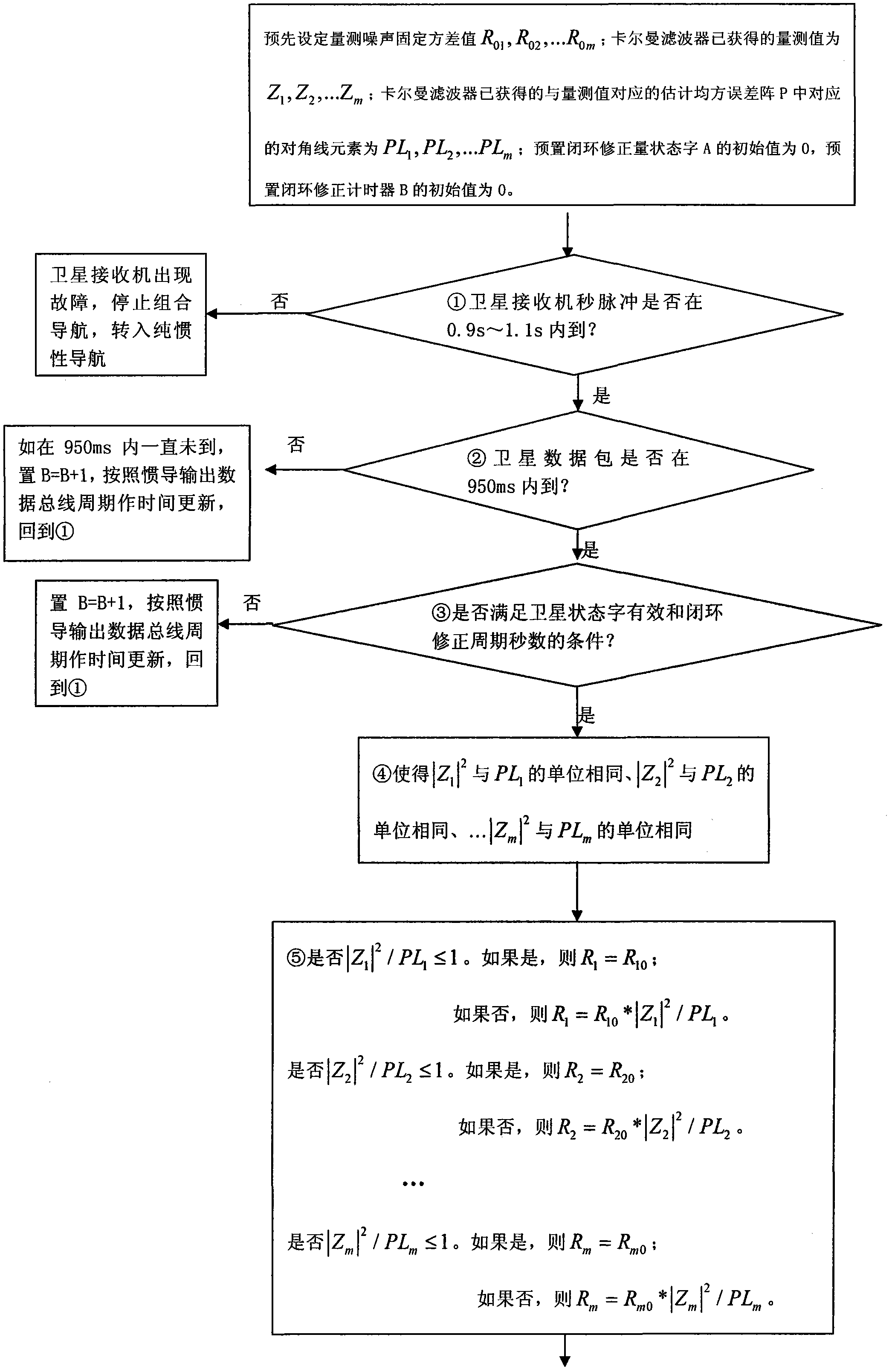
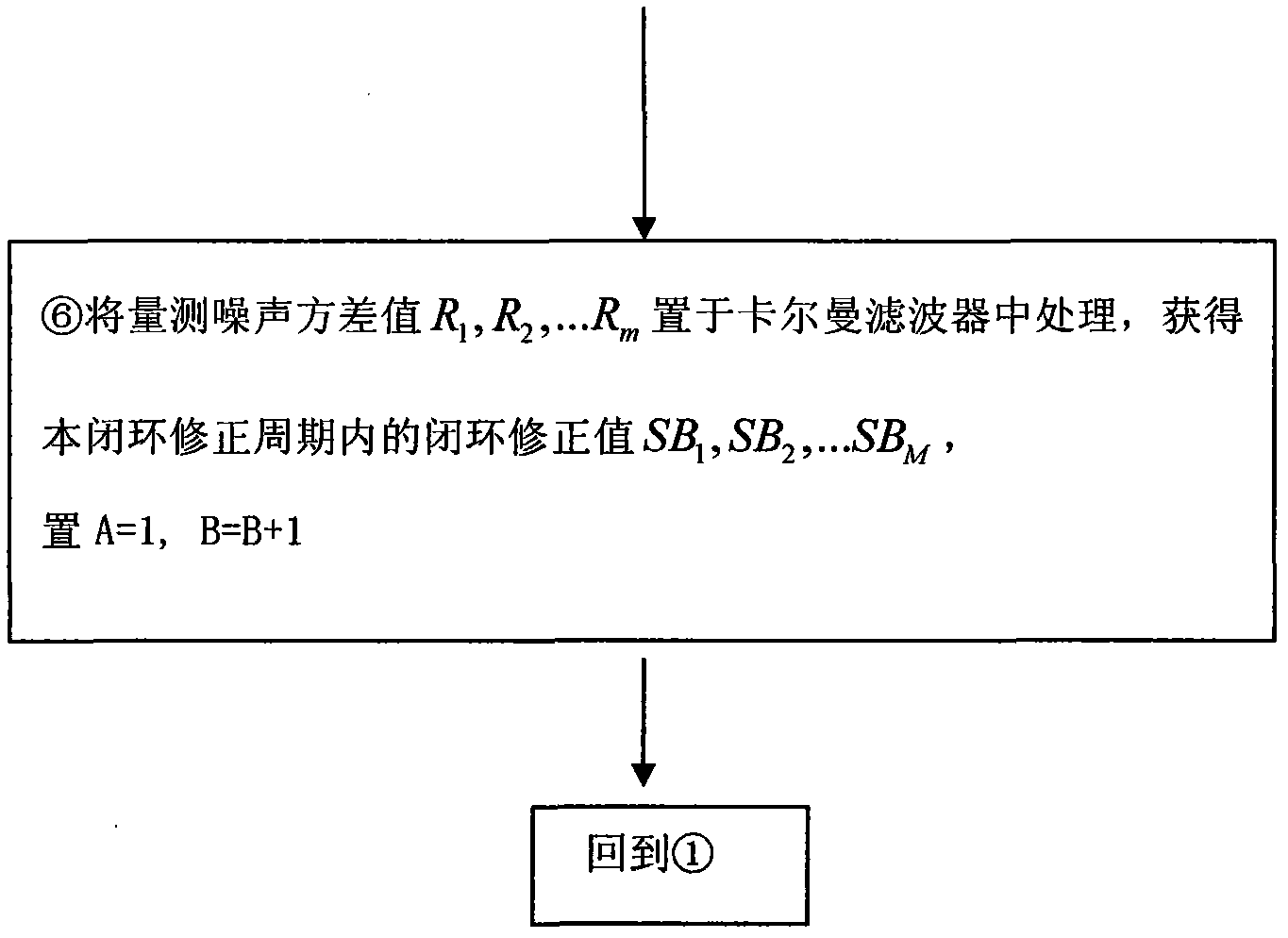
[0147] 1) Adaptively obtain the Kalman filter measurement noise variance value
[0148] Longitude and latitude can be selected as the quantity measurement, m=2, take R 01 = R 02 =20 2 (m 2 ), the closed-loop correction period is 10s.
[0149] but:
[0150] ①Judge whether the second pulse of the satellite receiver arrives within 0.9s~1.1s, the result: yes;
[0151] ②Judge whether the satellite data packet arrives within 950ms, the result: yes;
[0152] ③ Judging whether the conditions of valid satellite status word and closed-loop correction cycle seconds are satisfied, the result: yes;
[0153] ④ makes | Z 1 | 2 with PL 1The units are the same, |Z 2 | 2 with PL 2 The units are the same as the units are the same.
[0154] Hypothesis|Z 1 | 2 =(0.002°) 2 (latitude measurement), |Z 2 | 2 =(0.003°) 2 (measurement of longitude),
[0155] PL 1 =(4.712×10 -6 rad) 2 PL 1 =(6.283×10 -6 rad) 2 ...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap