Control device for robot, control method and computer program
A technology for controlling equipment and robots, applied in general control systems, program control manipulators, program control and other directions, which can solve problems such as small ground contact area and external force limitation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] Hereinafter, embodiments of the present disclosure are described with reference to the accompanying drawings.
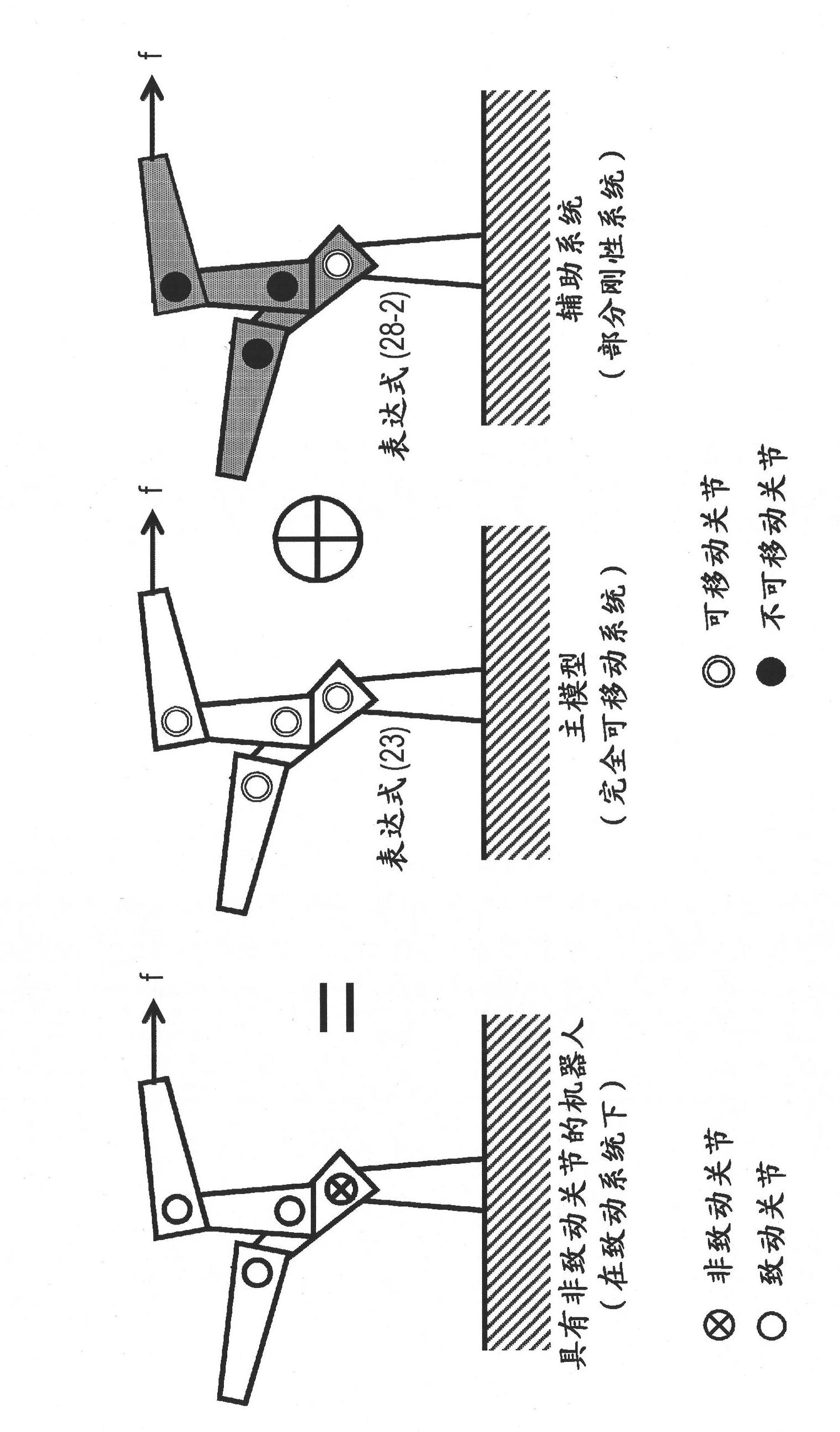
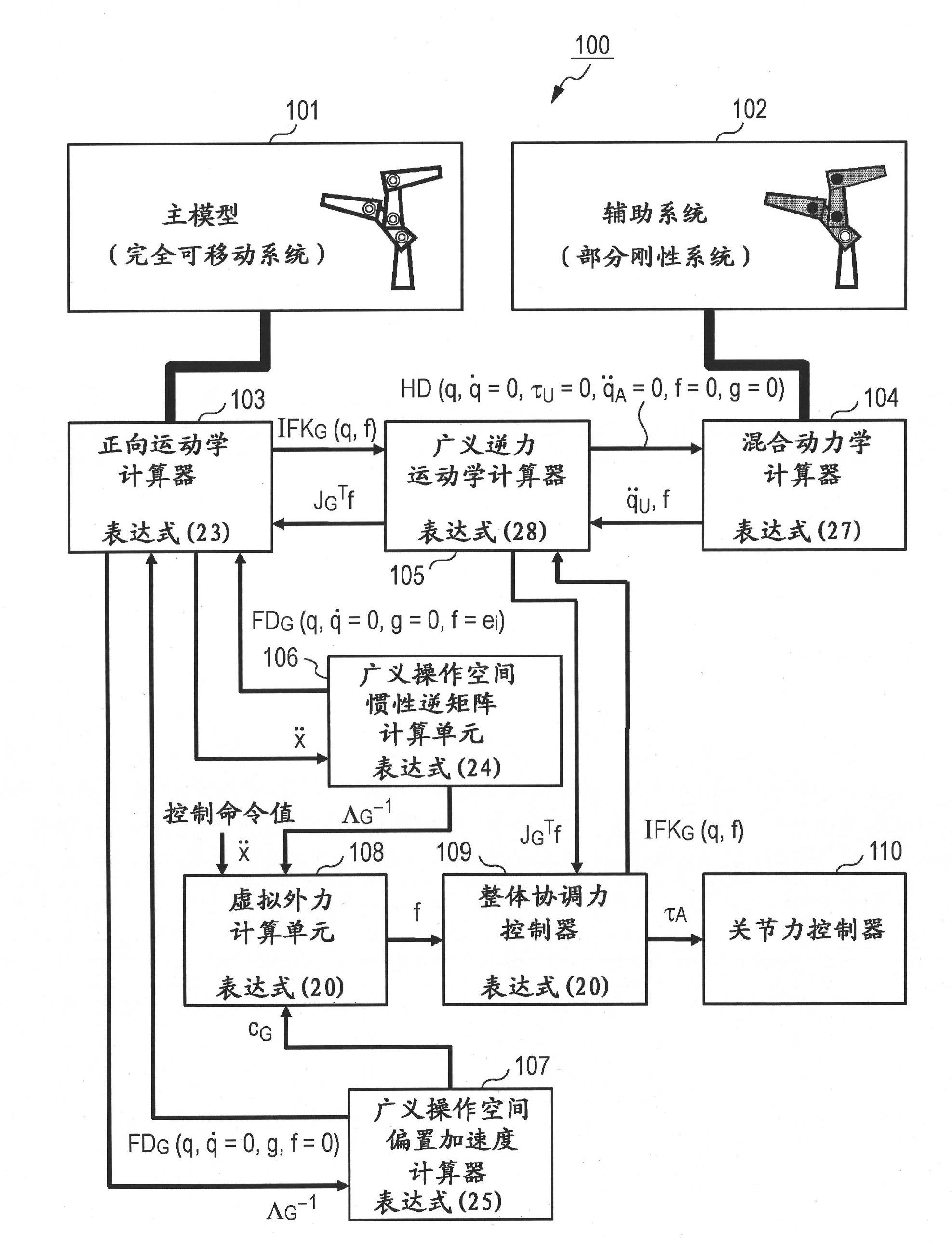
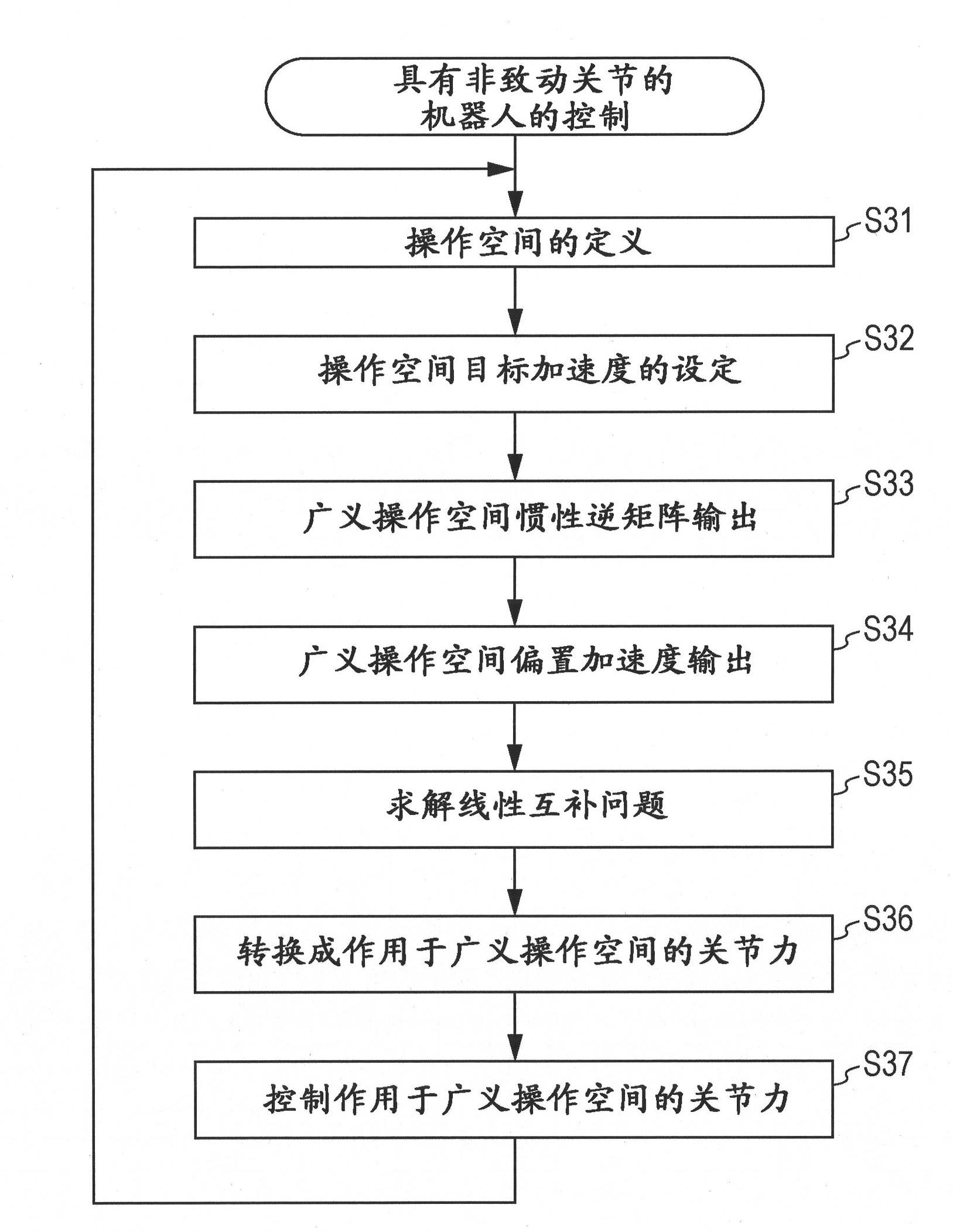
[0036] A robot is generally a link structure configured by multiple rigid bodies connected to each other. In inverted pendulum type robots, bipedal walking type robots, space robots, etc., some joints cannot generate force and can be modeled as non-actuated joints (see description above and Figure 11 to Figure 13 ). For example, in a link structure of a robot or the like, in order to generate a desired velocity at the end of the hand, it is necessary to obtain joint velocities. In addition, in order to generate the desired acceleration, joint forces must be obtained. In systems configured with only actuated joints, either all components of joint velocity or all components of joint acceleration can be directly controlled. However, in systems that include non-actuated joints, there is the problem that the components of the non-actuated joints cannot be direct...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More