

Forward dynamic and inverse dynamic response analysis and control method of parallel robot
A technology of inverse dynamics and response analysis, applied in general control systems, control/regulation systems, instruments, etc., can solve problems such as low efficiency, inability to obtain analytical solutions, and unfavorable system controller design.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0057] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
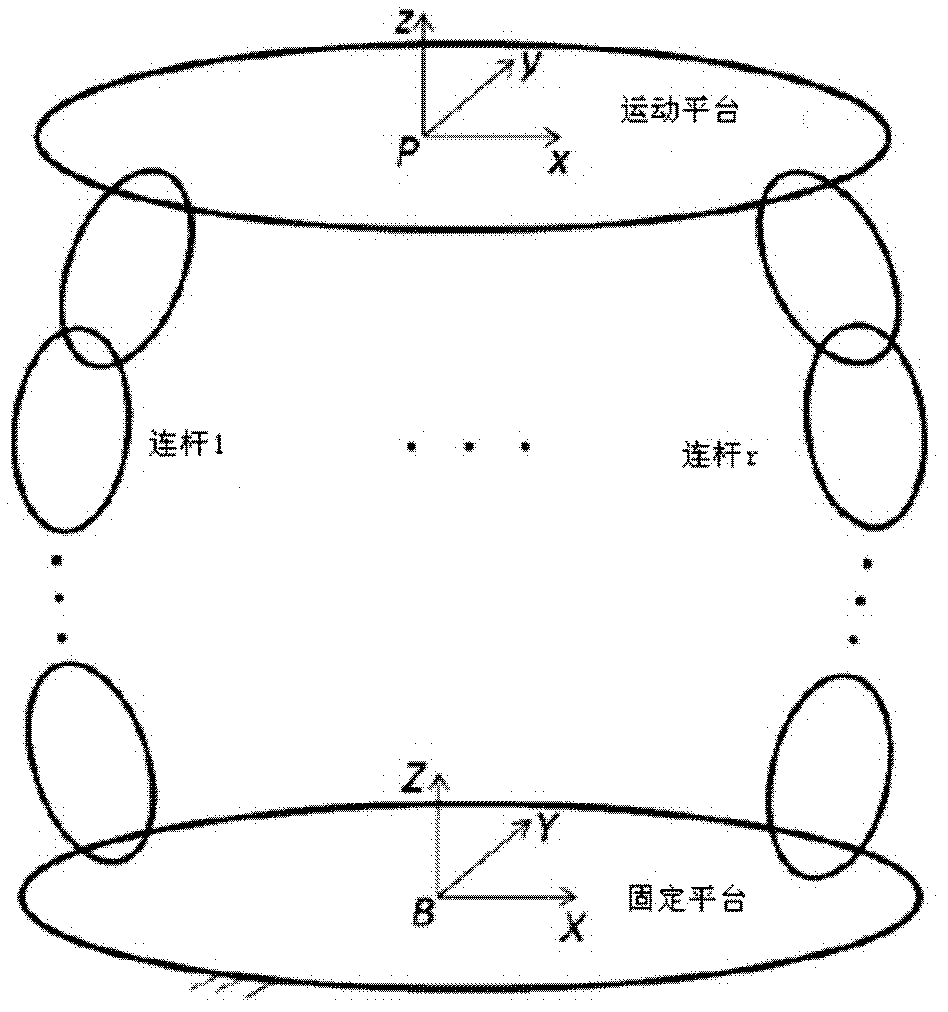
[0058] Although there are various structures of parallel robots, the most common one in practical applications is the Steward platform mechanism and its evolution. In the present embodiment, use a kind of U-P-S Steward-Gough platform (referring to Figure 4 and Figure 5 ) for detailed description, other parallel robots can also be analyzed according to the above method. see image 3 , Figure 6 , Figure 7 As shown, the specific process is as follows:
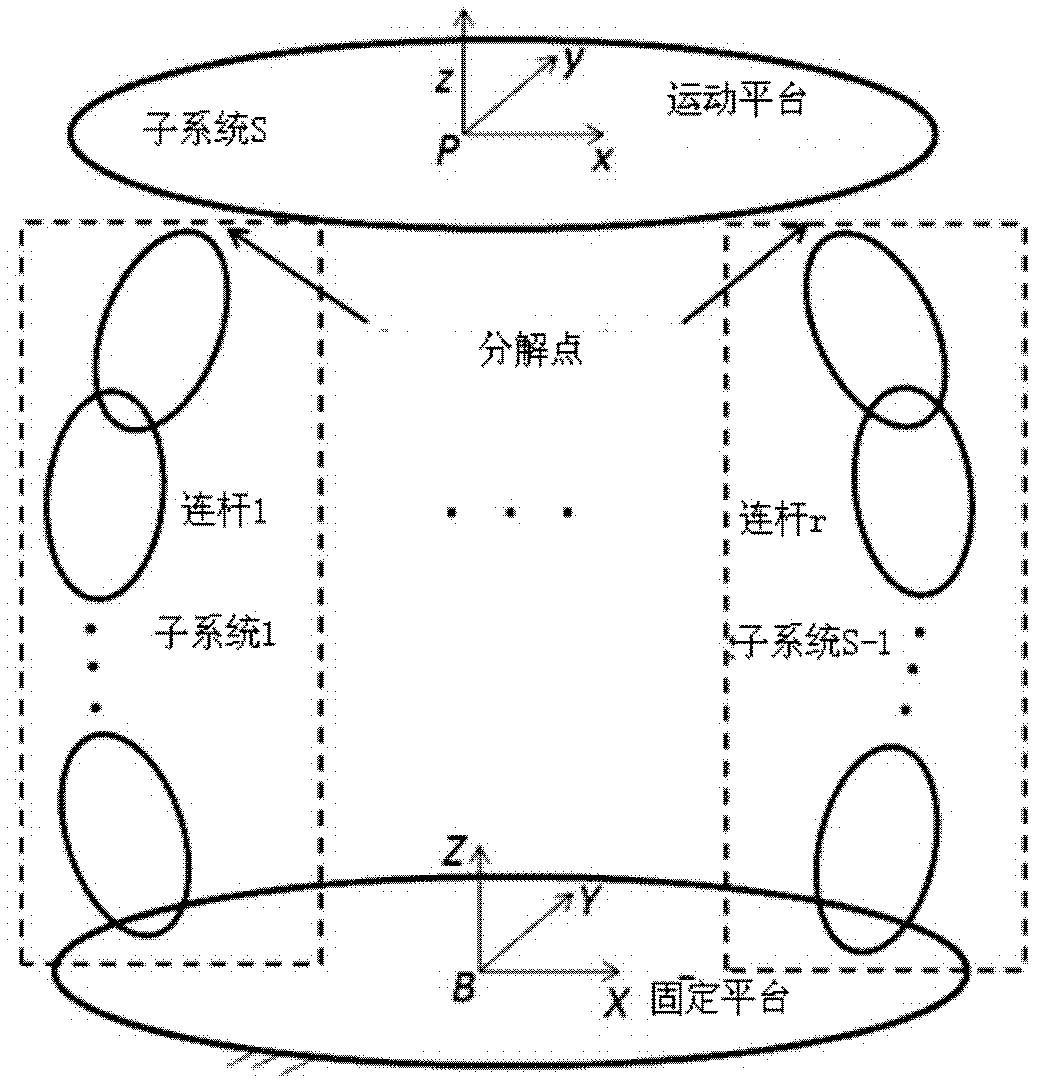
[0059] 1. Decompose the Steward-Gough platform. Decompose the Steward-Gough platform into 7 subsystems, including 6 linkage subsystems and 1 motion platform subsystem, see Figure 5 .
[0060] 2. Determine the dynamic equations of each branch chain (connecting rod) subsystem. The dynamic equations of the subsystems of six branch chains (connecting rods) are respectively estab...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More