

Multi-degree-of-freedom micromanipulator driven by multi-polarization mode piezoelectric actuator
A piezoelectric driver and micro-operation technology, which is applied in the direction of piezoelectric effect/electrostrictive or magnetostrictive motors, generators/motors, electrical components, etc. Miniaturization is difficult and other problems, to achieve the effect of miniaturization, high motion precision, wide application range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
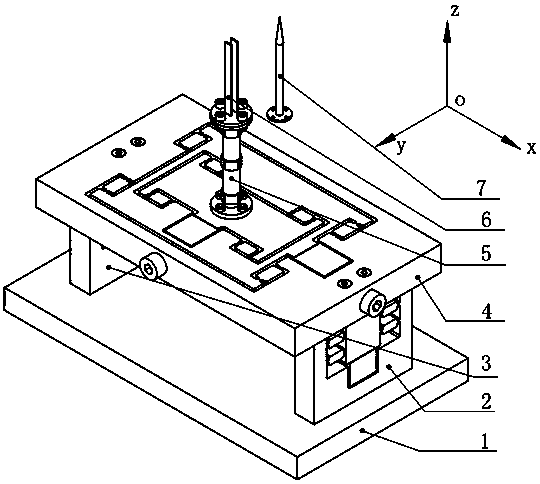
[0029] like figure 1As shown, the present invention includes a base 1, two Z-axis translation micro-motion mechanisms 2 and 3 with the same structure, a nested X-axis and Y-axis translation micro-motion mechanism 4, a Z-axis rotation micro-motion mechanism 5 and an end actuator mechanism, two Z-axis translation micro-motion mechanisms 2 and 3 with the same structure are symmetrically and vertically fixed on both sides of the base 1 through two sets of holes 8 and 10, 15 and 17, and the nested X-axis and Y-axis translation micro-motion mechanisms The two ends of the moving mechanism 4 are connected to the two Z-axis translation micro-moving mechanisms 2 and 3 respectively through two groups of holes 22 and 29, and the Z-axis rotating micro-moving mechanism 5 passes through a group of ring-shaped evenly distributed on the lower flange 33. The hole is con...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More