

HLA (High Level Architecture)-based multi-unmmaned aerial vehicle distributed simulation method
A distributed simulation and multi-UAV technology, applied in the field of distributed simulation platform, can solve the problems of no similar patents found, no distributed simulation platform, etc., and achieve the effect of speeding up the process, reducing R&D costs, and visually verifying the environment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
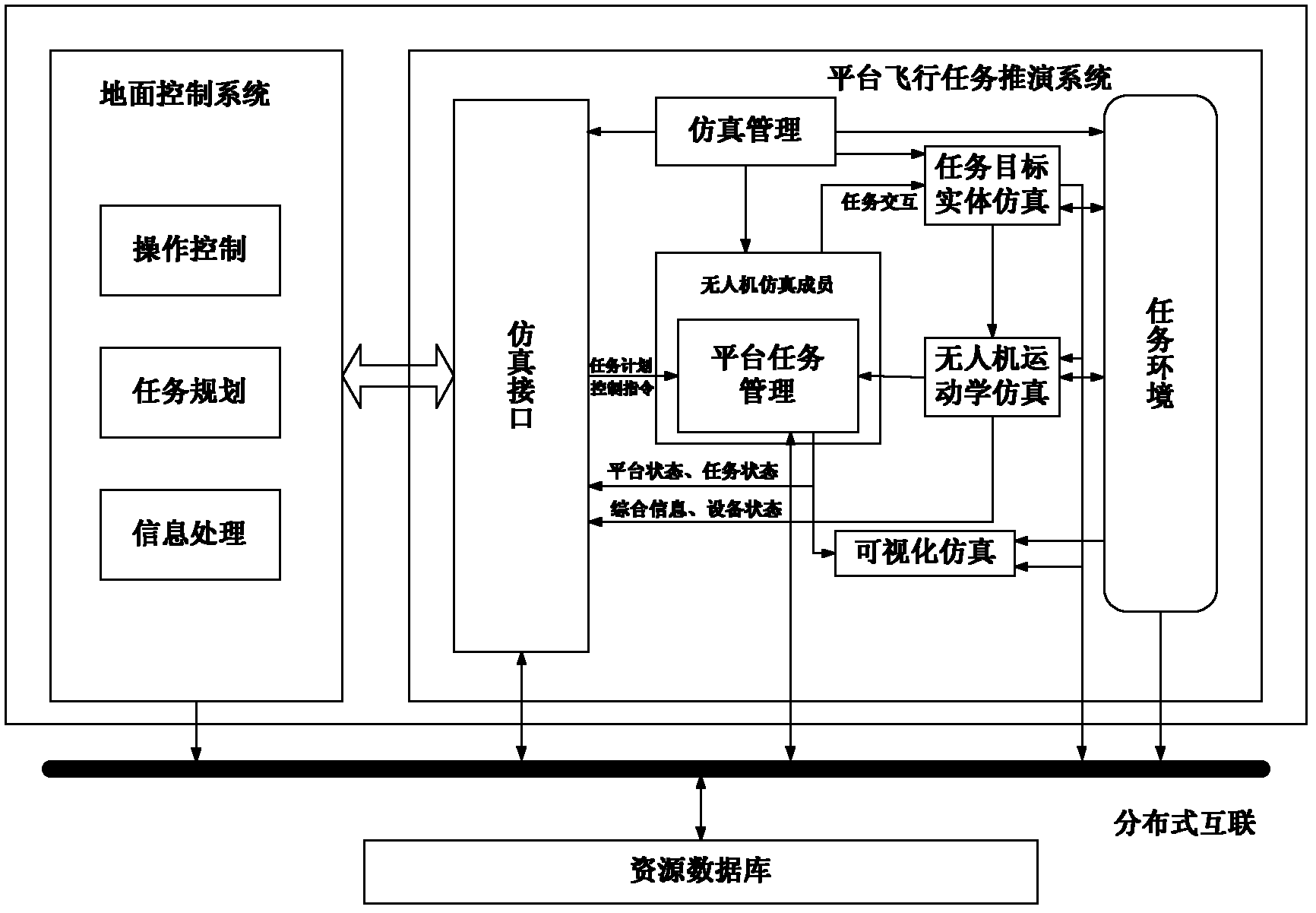
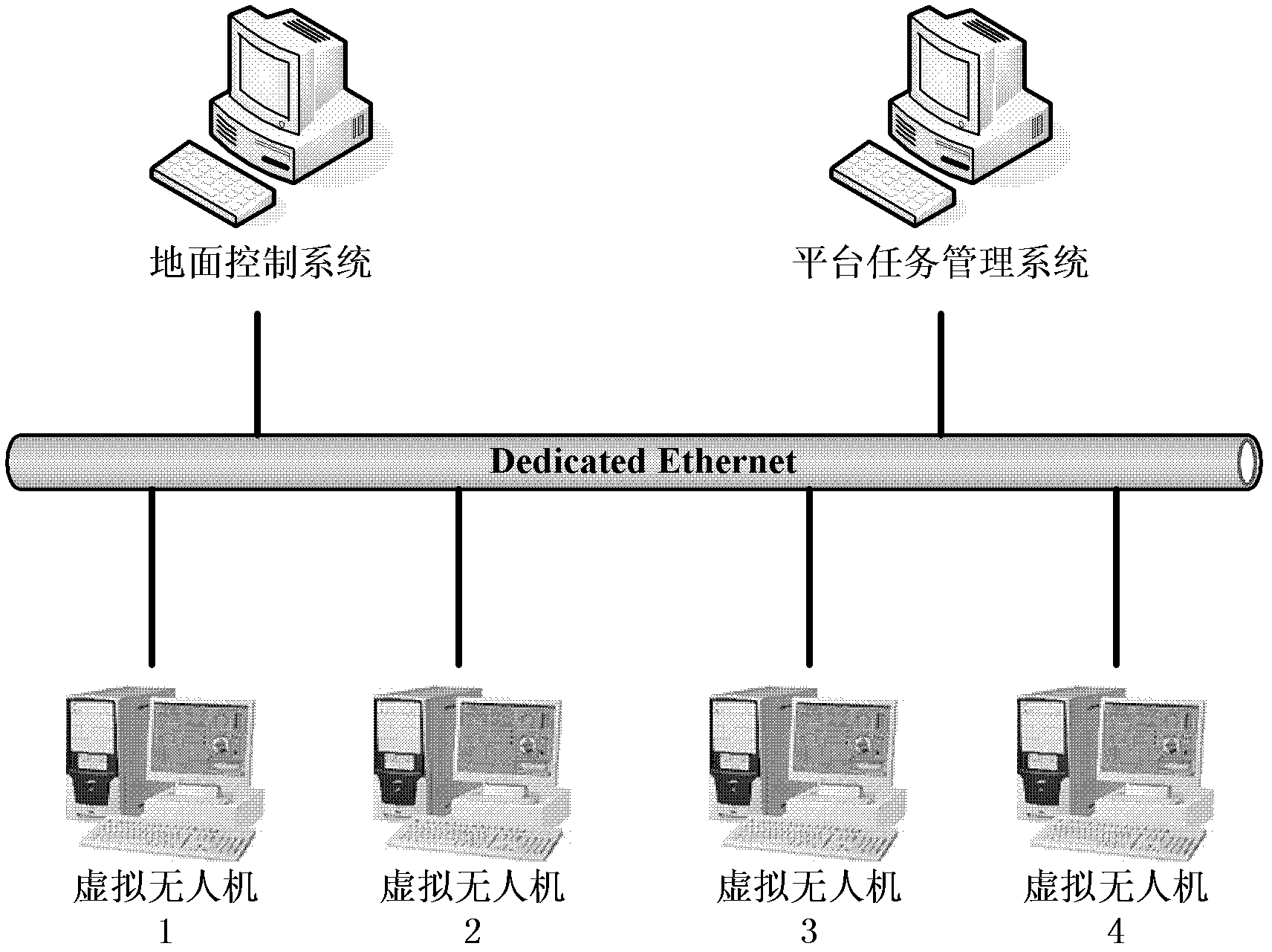
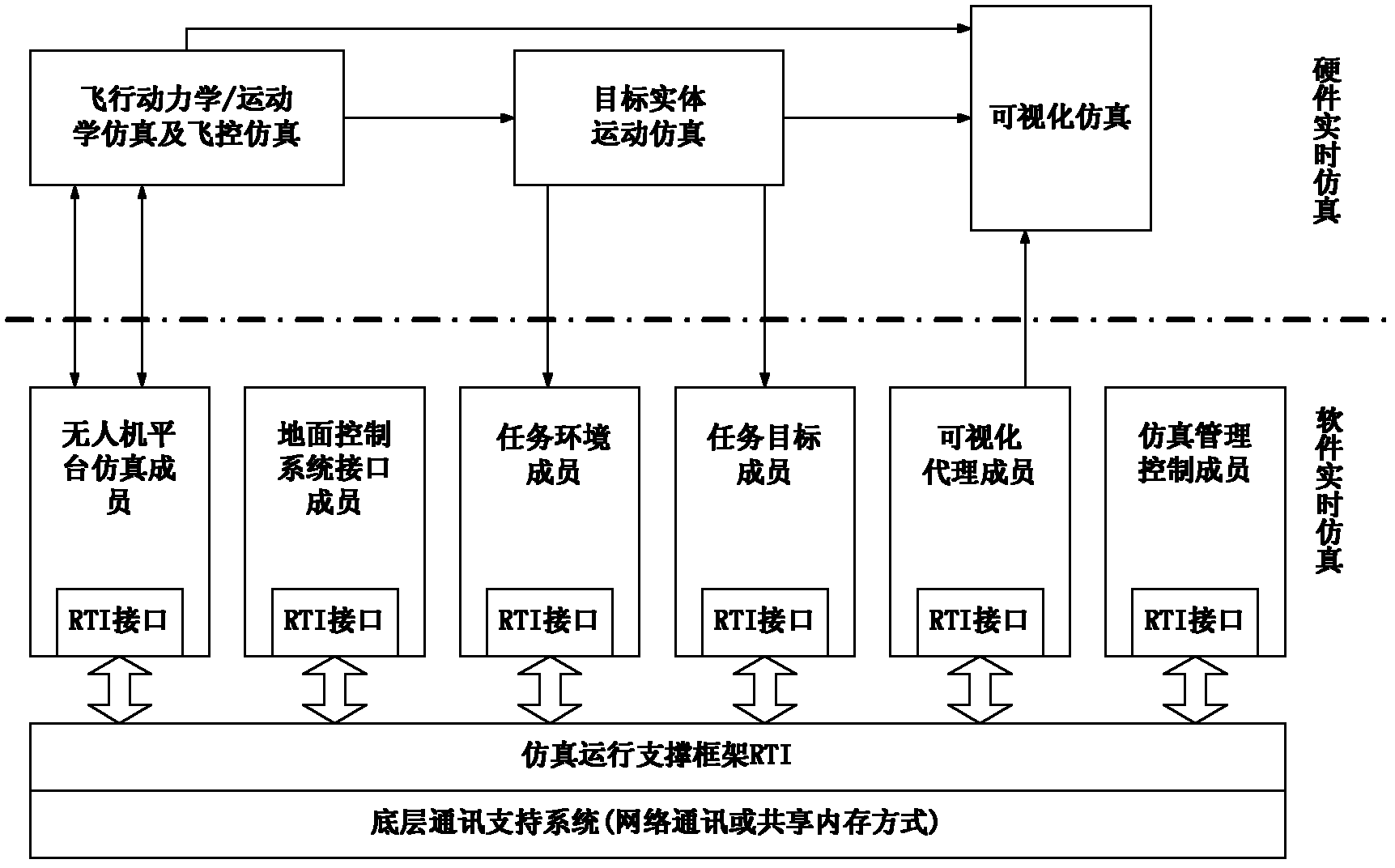
[0028] Based on the HLA high-level architecture, the distributed interconnection between various system modules in the multi-UAV simulation environment is realized, and the interactive operation between various simulation applications is realized through the federal runtime structure RTI, which makes the whole system scalable. It uses Ethernet UDP to communicate, uses the layered simulation structure combining soft real-time simulation and hard real-time simulation, coordinates the synchronization of the system, and reduces the impact of HLA time performance on system integration. The multi-UAV distributed simulation platform of the present invention can be set for different tasks, such as formation flight, multi-machine cooperative tracking, area coverage, etc., to complete the deduction and simulation of multi-UAV task control and execution process, intuitive performance The simulation process of multiple UAVs. At the same time, the distributed-based design has excellent sca...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More