

Two-degree-of-freedom space parallel connection robot
A degree of freedom and robot technology, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as poor stiffness and complex structure, achieve simple structure, good dynamic performance, and solve the effect of insufficient lateral stiffness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
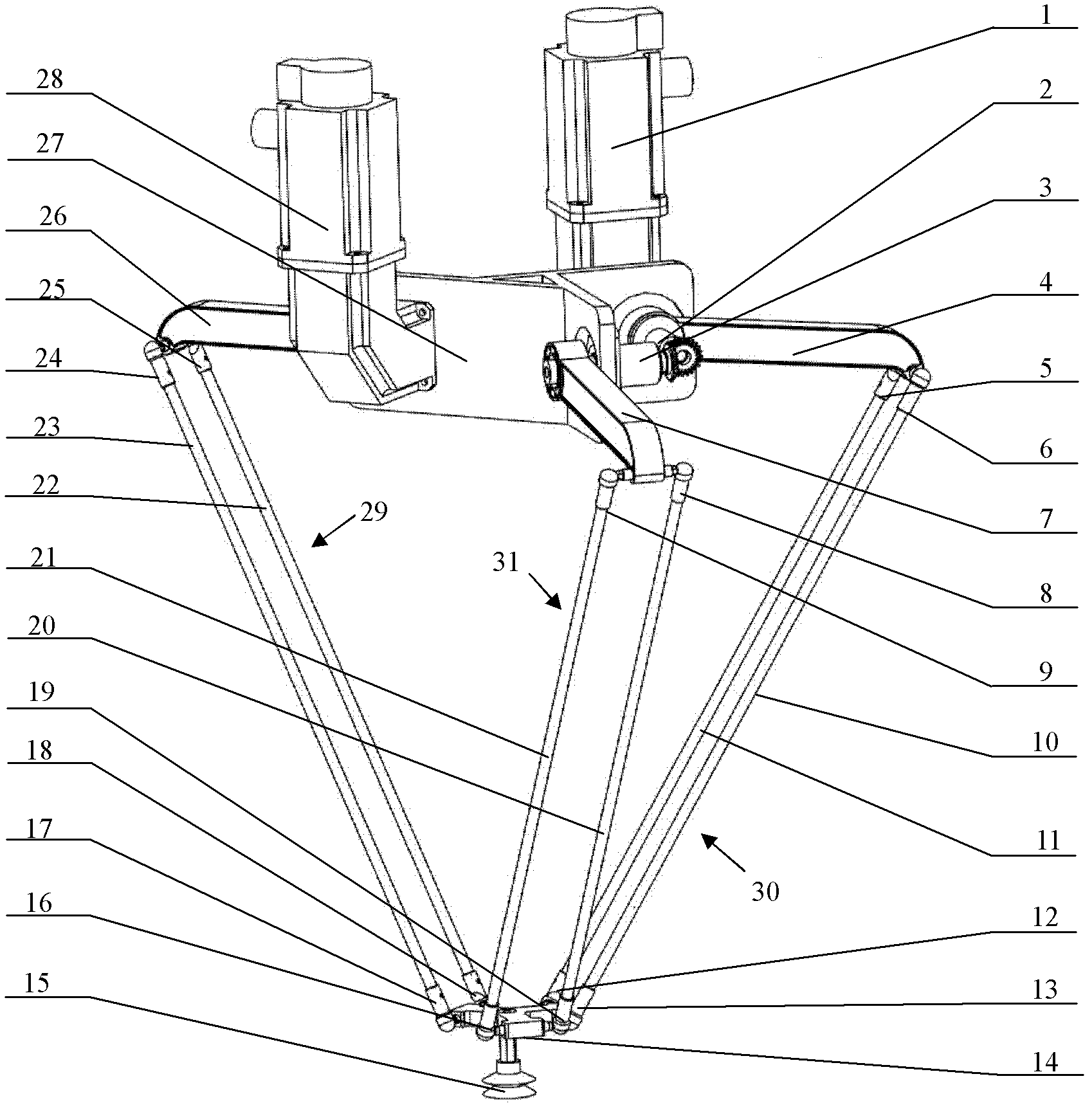
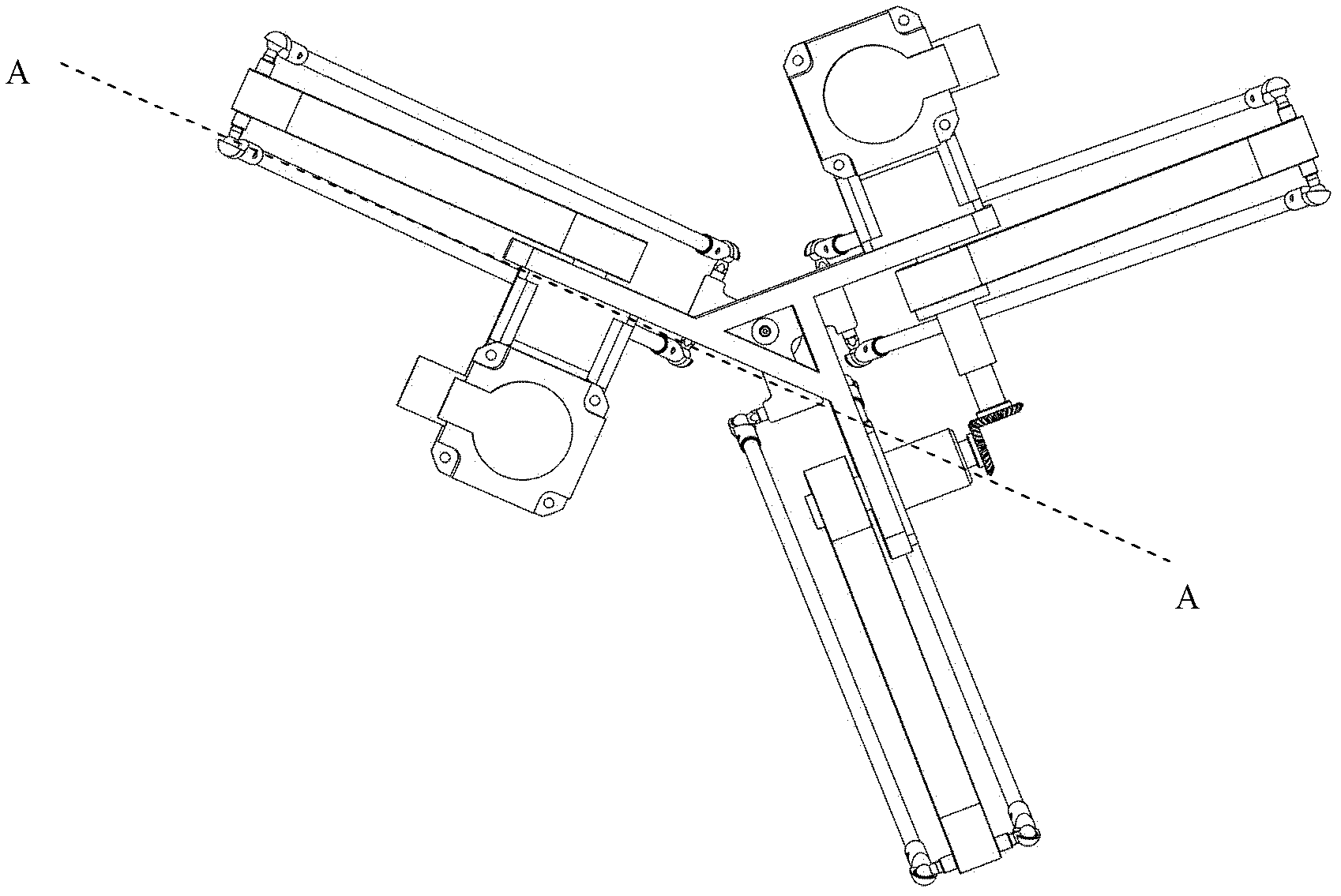
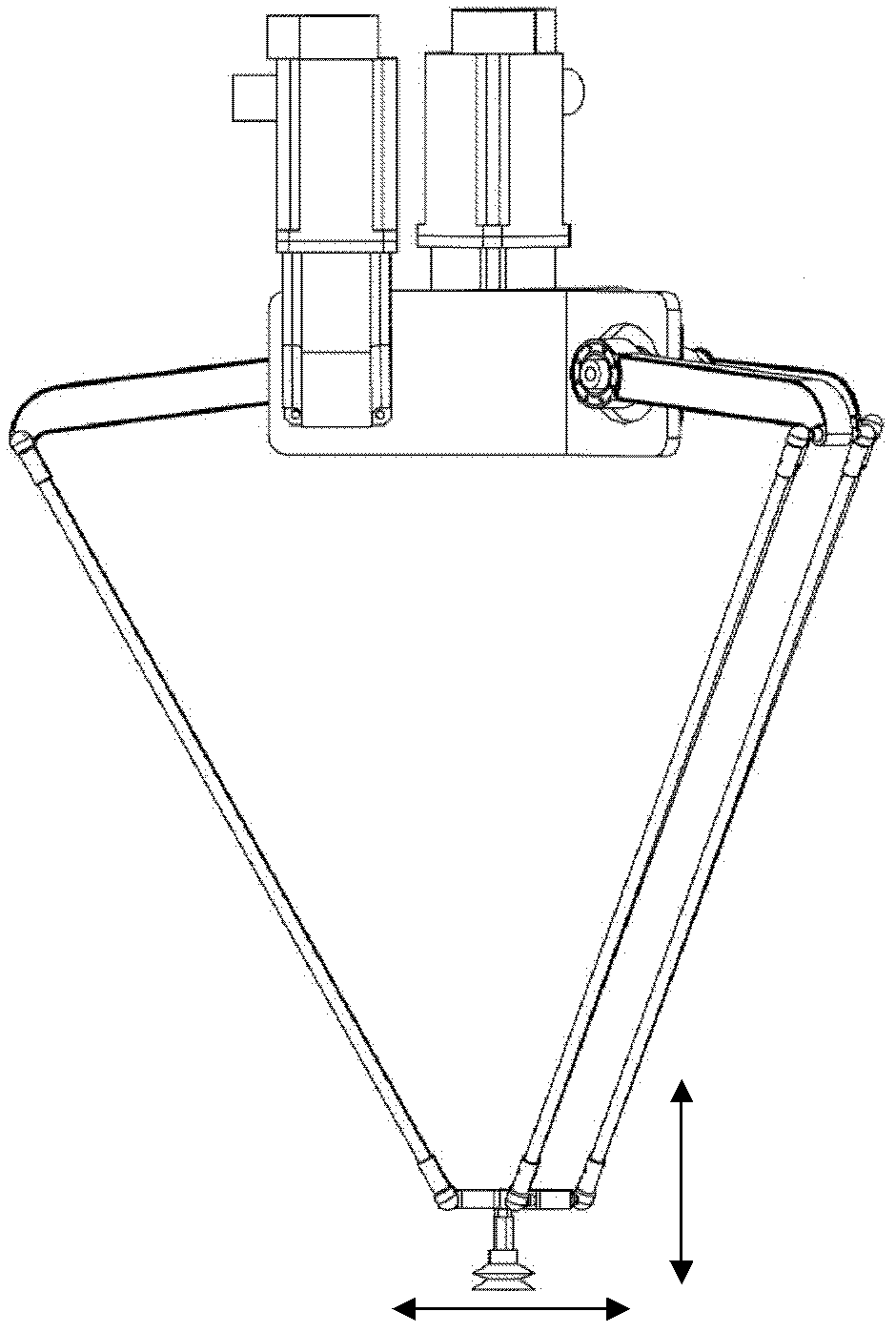
[0017] Such as figure 1 As shown, the present invention is a two-degree-of-freedom space parallel robot, comprising a static platform 27, a moving platform 14 and three motion branch chains connected between the static platform 27 and the moving platform 14, and the moving platform 14 is provided with an end effector 15; the static platform 27 is provided with a first driving device 1 and a second driving device 28, and the three motion branch chains are composed of a first linkage mechanism 29 and a second linkage mechanism 30 and the third linkage mechanism 31; the first linkage mechanism 29, the second linkage mechanism 30 and the third linkage mechanism 32 are all composed of a driving rod and a driven rod; the second linkage mechanism The rod mechanism 30 and the third linkage mechanism 31 are arranged symmetrically with the plane where the first linkage mechanism 29 is located; one end of the active rod of the first linkage mechanism 29 and the second linkage mechanism 3...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More