

Multipoint mechanical hand for myriametre well drill
A mechanical gripper, drilling machine technology, applied in the directions of manipulators, manufacturing tools, chucks, etc., can solve the problems of few contact points, unreliable grasping, uneven distribution of contact points, etc., and achieve the effect of increasing friction area and tightening reliability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
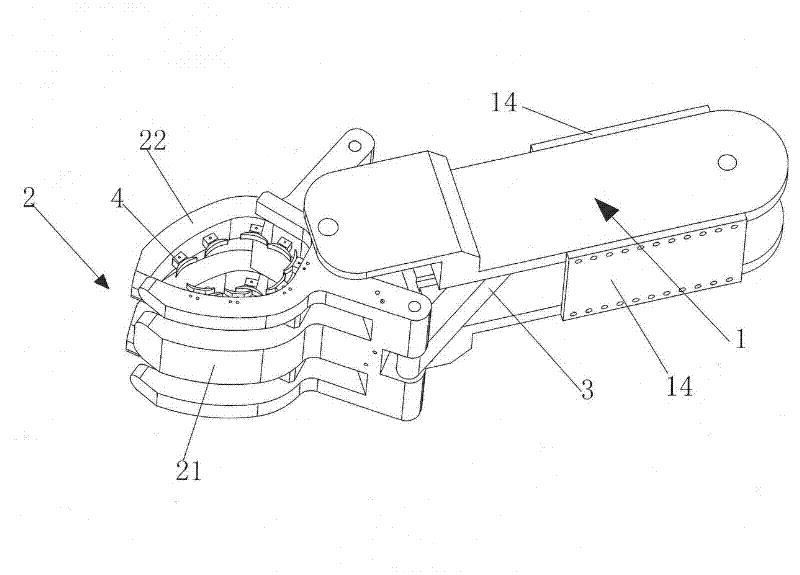
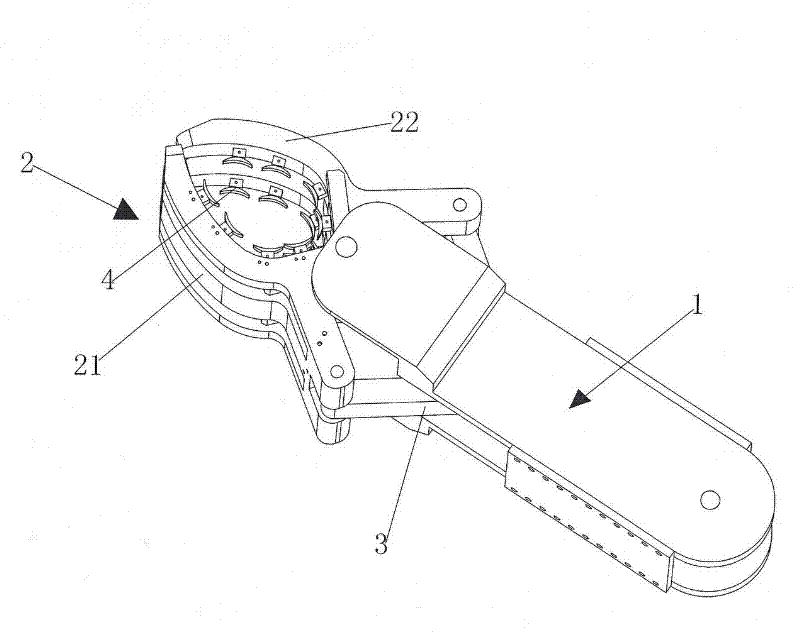
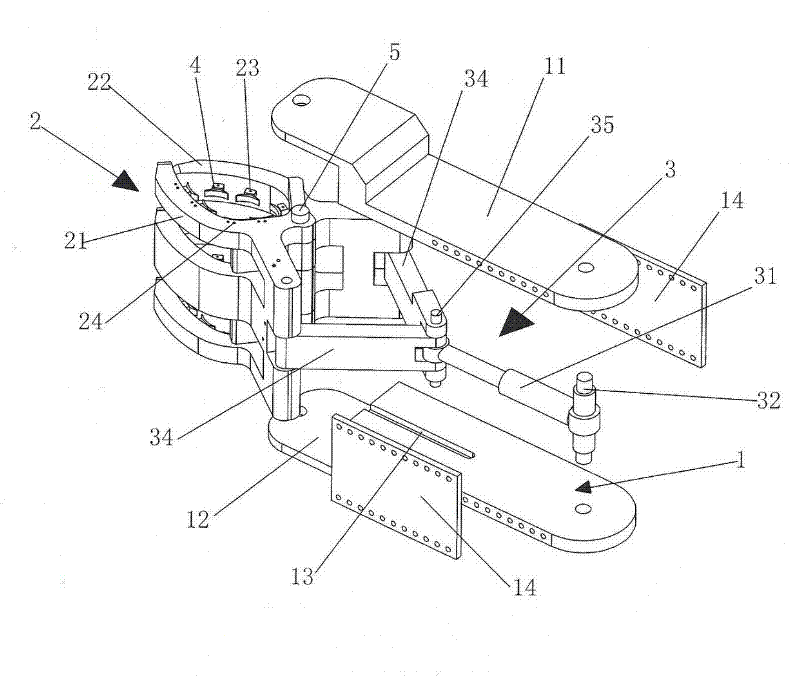
[0018] See figure 1 , figure 2 with image 3 As shown, the present invention is composed of an arm 1 and a crossed gripper 2, a gripper drive mechanism 3 and an elastic floating friction mechanism 4, wherein the crossed gripper 2 is as Figure 4 with Figure 5 As shown, it is composed of a left finger 21 and a right finger 22. The middle of the rear ends of the left finger 21 and the right finger 22 are hinged together by the first shaft 5. The left finger 21 and the right finger 22 are respectively extended with force arms 211 and Force arm 222; the gripper drive mechanism 3 is composed of a hydraulic cylinder 31, a vertical shaft 32, a left link 33 and a right link 34. The front ends of the left link 33 and the right link 34 are hinged on the force arm 211 and the force arm 222, respectively The rear end of the left link 33 and the rear end of the right link 34 are jointly hinged with the front end of the hydraulic cylinder 31 through the second shaft 35. The rear end of the h...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More