

Autonomous obstacle-avoiding planning method of tour detector based on binocular stereo vision
A binocular stereo vision and detector technology, applied in instruments, two-dimensional position/channel control, image data processing, etc., can solve the problem of low efficiency of autonomous obstacle avoidance planning, lack of completeness of path planning, and too simple model, etc. question
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
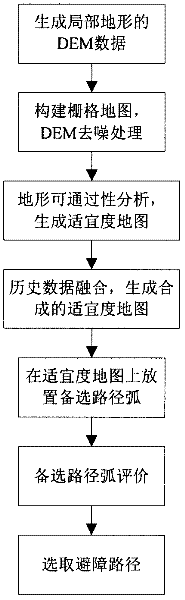
[0058] The basic idea of the present invention is to use the image parallax data processed by the binocular stereo vision system to perform three-dimensional restoration, obtain the original DEM of the local terrain, and perform denoising processing on the original DEM; Terrain passability analysis to obtain a suitability map for obstacle avoidance planning; evaluate the alternative path arcs on the suitability map, and if there is a safe path, select the alternative path arc with the highest evaluation value as the avoidance path arc. result of disability planning.
[0059] Such as figure 1 Shown, the present invention realizes steps as follows:
[0060] (1) Generate DEM data of local terrain
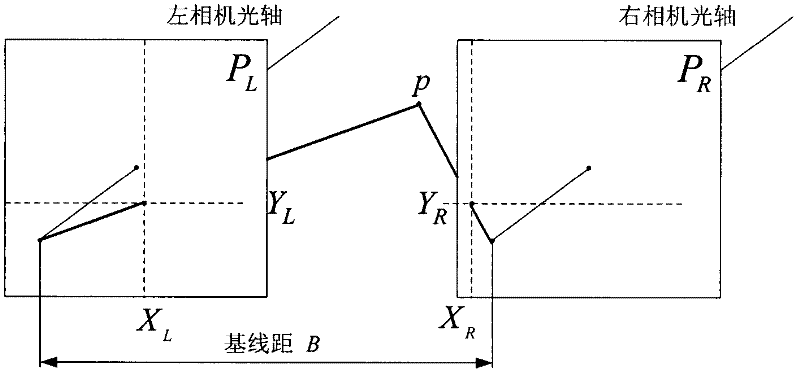
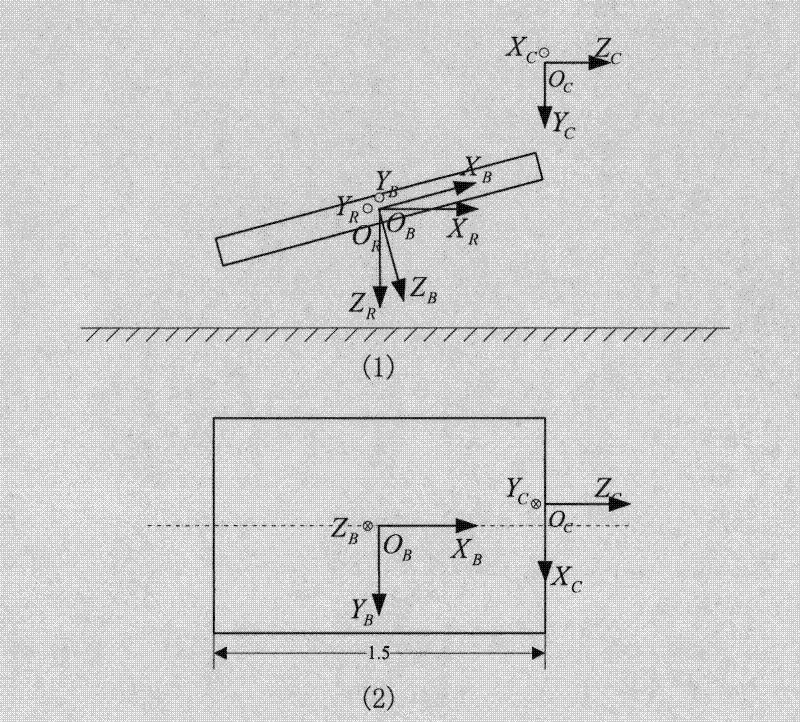
[0061] According to the principle of binocular stereo vision imaging, using the disparity data obtained by image matching, first calculate the three-dimensional coordinates (x c ,y c ,z c ); According to the installation position of the binocular stereo vision system on the patr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More