

Controllable mechanism type parallel robot platform with six degrees of freedom
A technology of degrees of freedom and robots, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problems of increased manufacturing costs of six-degree-of-freedom robots, reduced load capacity of parallel robots, and poor reliability of robot platforms, etc., to achieve easy programming Control, ease of maintenance, increased stiffness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The technical solution of the present invention will be further described below with reference to the accompanying drawings.
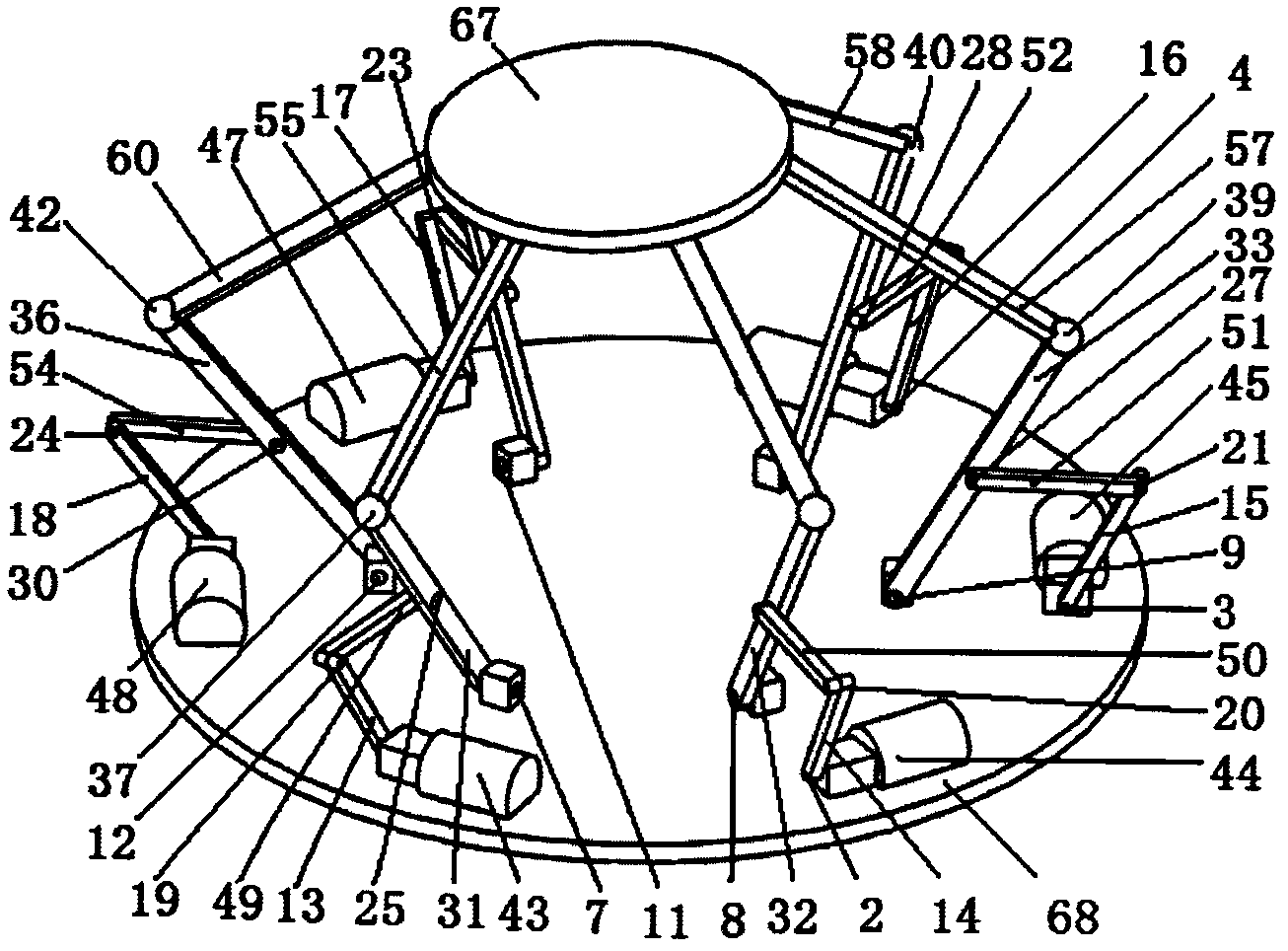
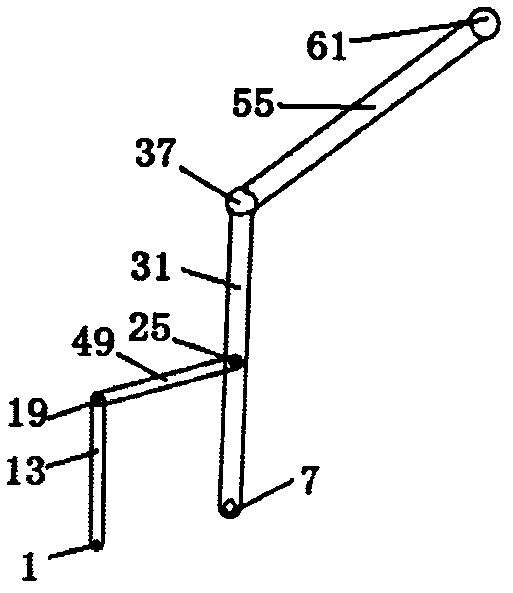
[0042] control figure 1 , a six-degree-of-freedom parallel robot platform with a controllable mechanism includes a fixed platform 68, a moving platform 67 and six branch chains.
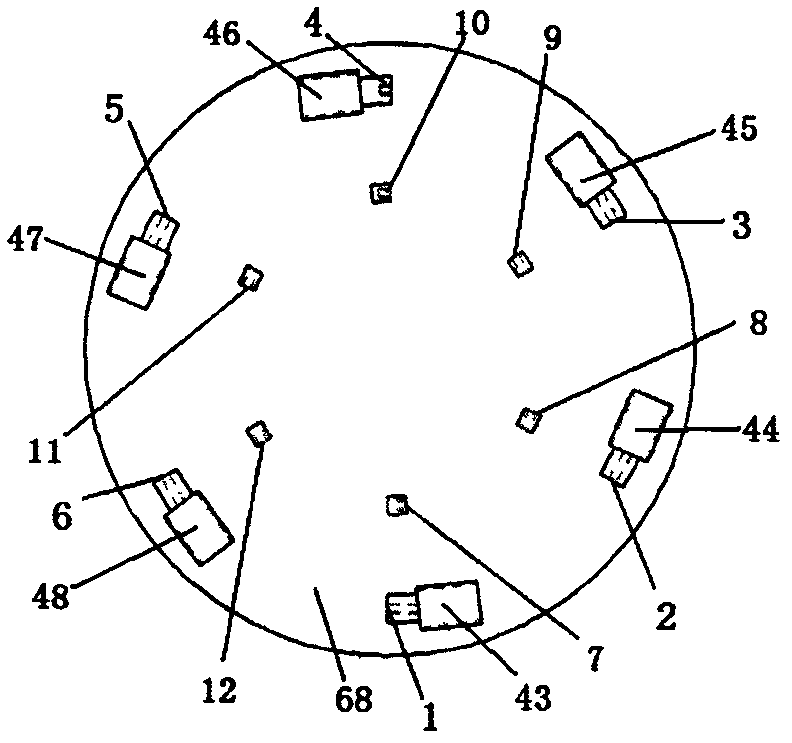
[0043] control figure 1 , figure 2 , on the fixed platform 68, twelve reaming holes are distributed, the first reaming hole 1, the second reaming hole 2, the third reaming hole 3, the fourth reaming hole 4, the fifth reaming hole 5, the sixth reaming hole The reaming holes 6 are evenly distributed on a circle, and the seventh reaming hole 7, the eighth reaming hole 8, the ninth reaming hole 9, the tenth reaming hole 10, the eleventh reaming hole 11, and the twelfth reaming hole 12 are evenly distributed. Distributed on another circumference, and the two circumferences are concentric, the axis of each reaming hole on the fixed platform 68 is tangent to the circumfer...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More