

Obstacle processing method for robot
A processing method and robot technology, applied in the direction of two-dimensional position/channel control, etc., can solve the problems of missing or repeated cleaning in the cleaning area, and missed scanning in the area, so as to improve the efficiency of dust removal and avoid the effect of missed sweeping
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
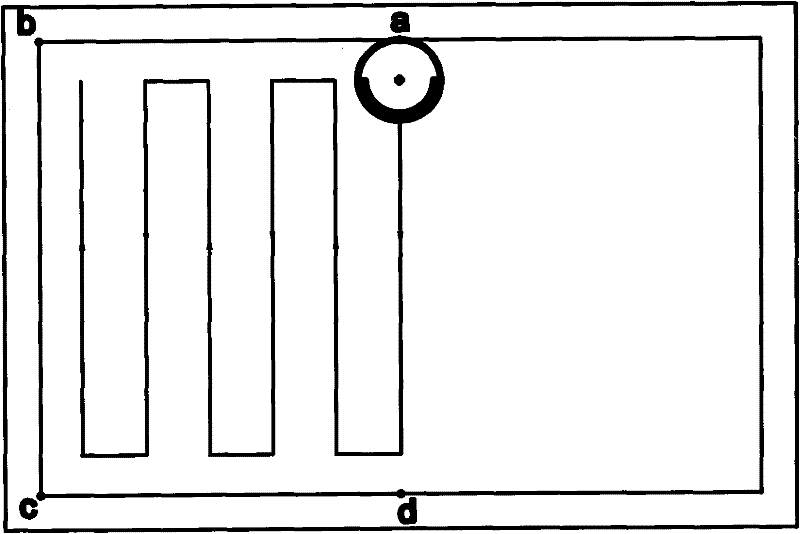
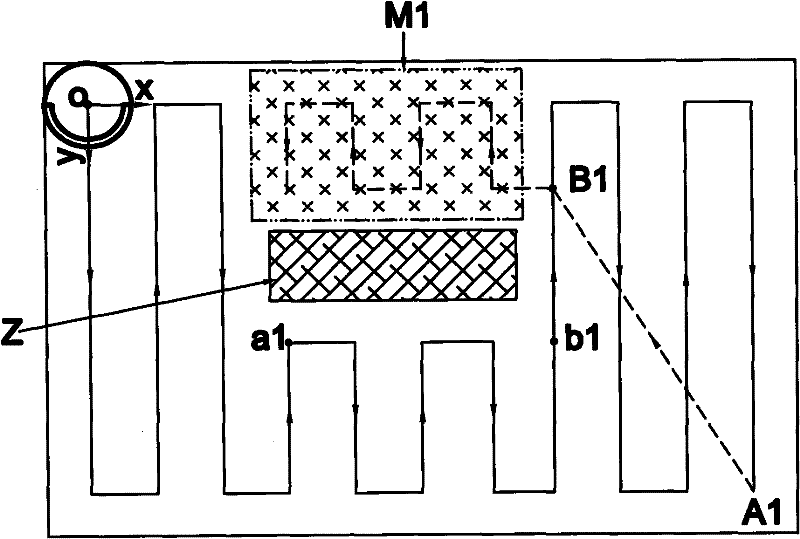
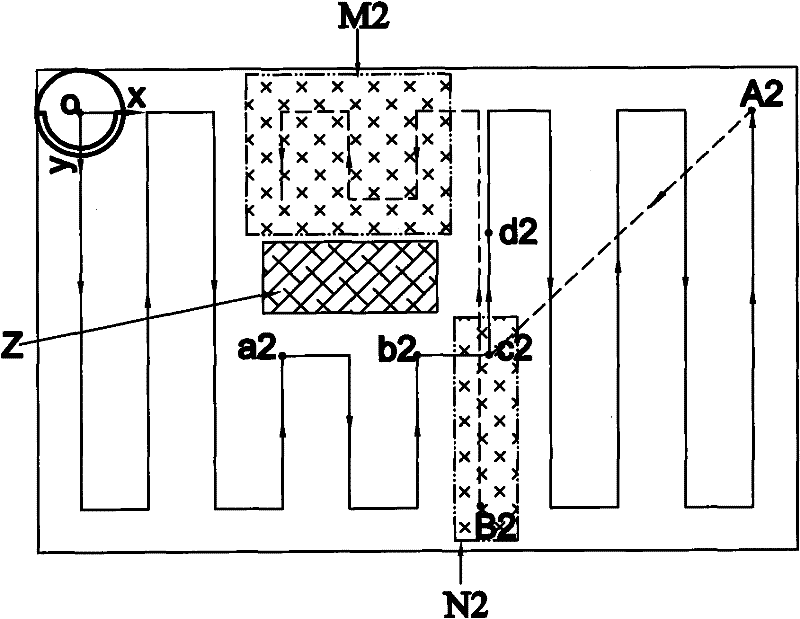
[0040] Example: Reference Figure 1-14 , the present invention provides a specific embodiment of a robot obstacle handling method. First, start the robot by operating the operation buttons on the robot body or selecting the cleaning method through the remote controller. The robot starts from the base station or from other places except the base station, and then divides the cleaning area according to the different starting locations:
[0041] When the robot starts from the base station and encounters an obstacle for the first time, the robot will use the connection line between the base station and the collision point as the dividing line, divide the cleaning area into left and right parts, and start from the left area Start cleaning. After cleaning on the left side, the robot quickly returns to the right side by the shortest path and starts cleaning on the right side. Of course, the robot can also clean the right side area first, and then clean the left side area.
[0042] W...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More