Hopping robot capable of hopping continuously
A robot and frame technology, applied in the field of bouncing robots, can solve the problems of inability to achieve continuous jumping, high machining accuracy and installation requirements of robot parts, and achieve the effects of strong initiative and robustness, simple mechanism, and optimized motion.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The specific embodiments of the present invention will be described in further detail below in conjunction with the accompanying drawings and examples.
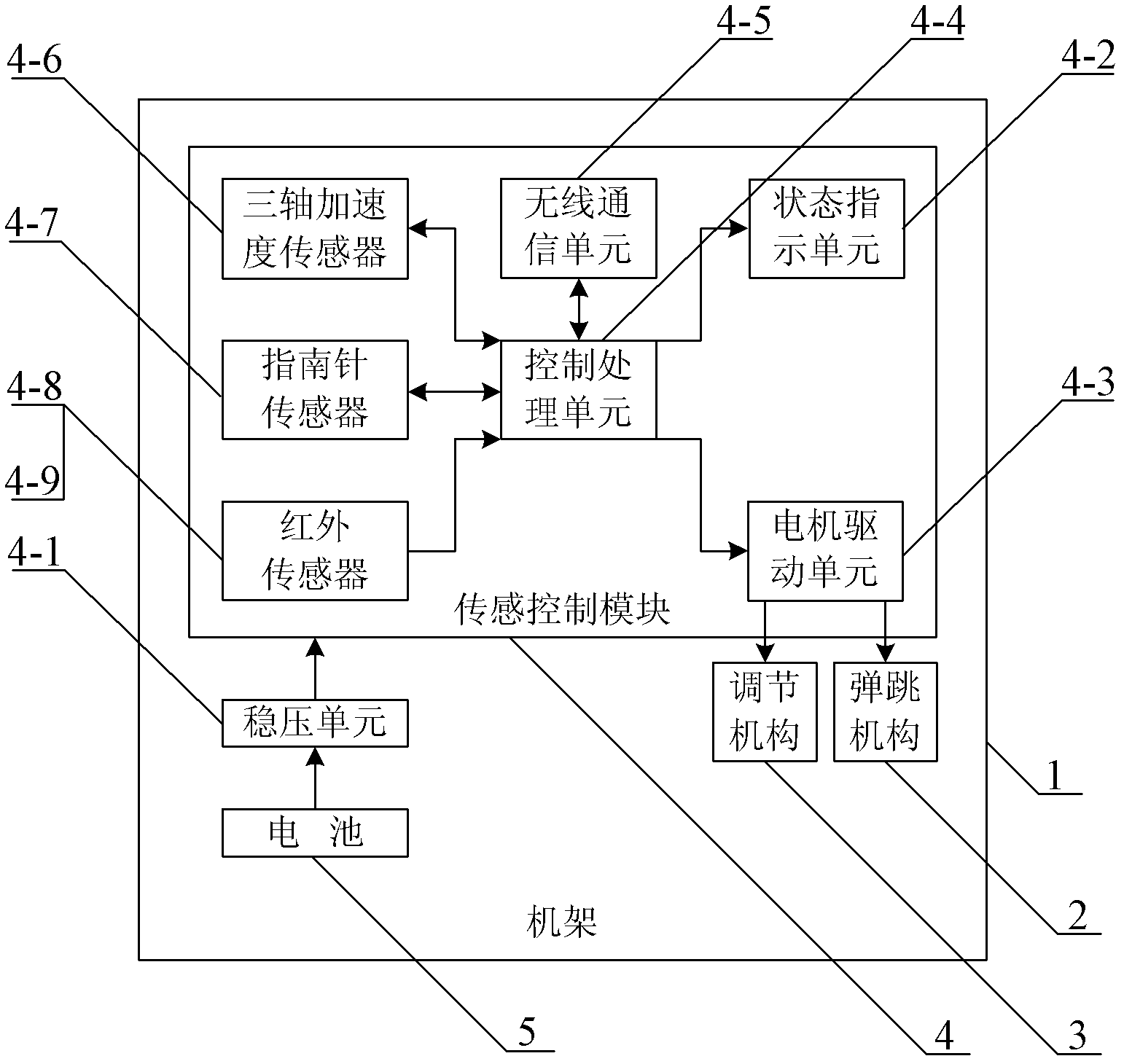
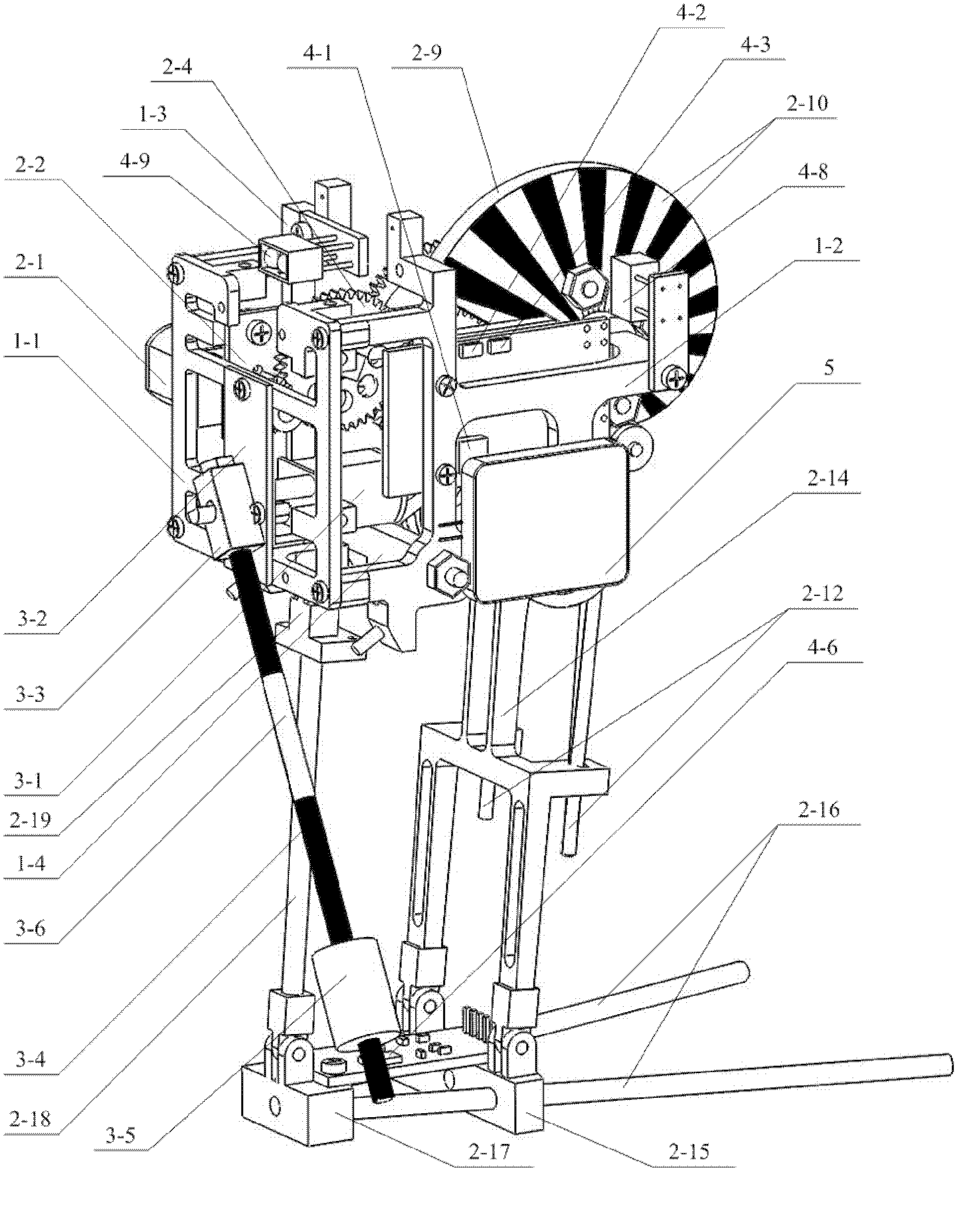
[0028] see figure 1 , the bouncing robot of the present invention includes a frame 1 , a bouncing mechanism 2 , an adjustment mechanism 3 , a sensor control circuit module 4 and a battery 5 . Wherein, the sensing control circuit module 4 includes a voltage stabilizing unit 4-1, a state indication unit 4-2, a motor drive unit 4-3, a control processing unit 4-4, a wireless communication unit 4-5, a three-axis acceleration sensor 4- 6. Compass sensor 4-7, infrared sensor 4-8 and infrared sensor 4-9.
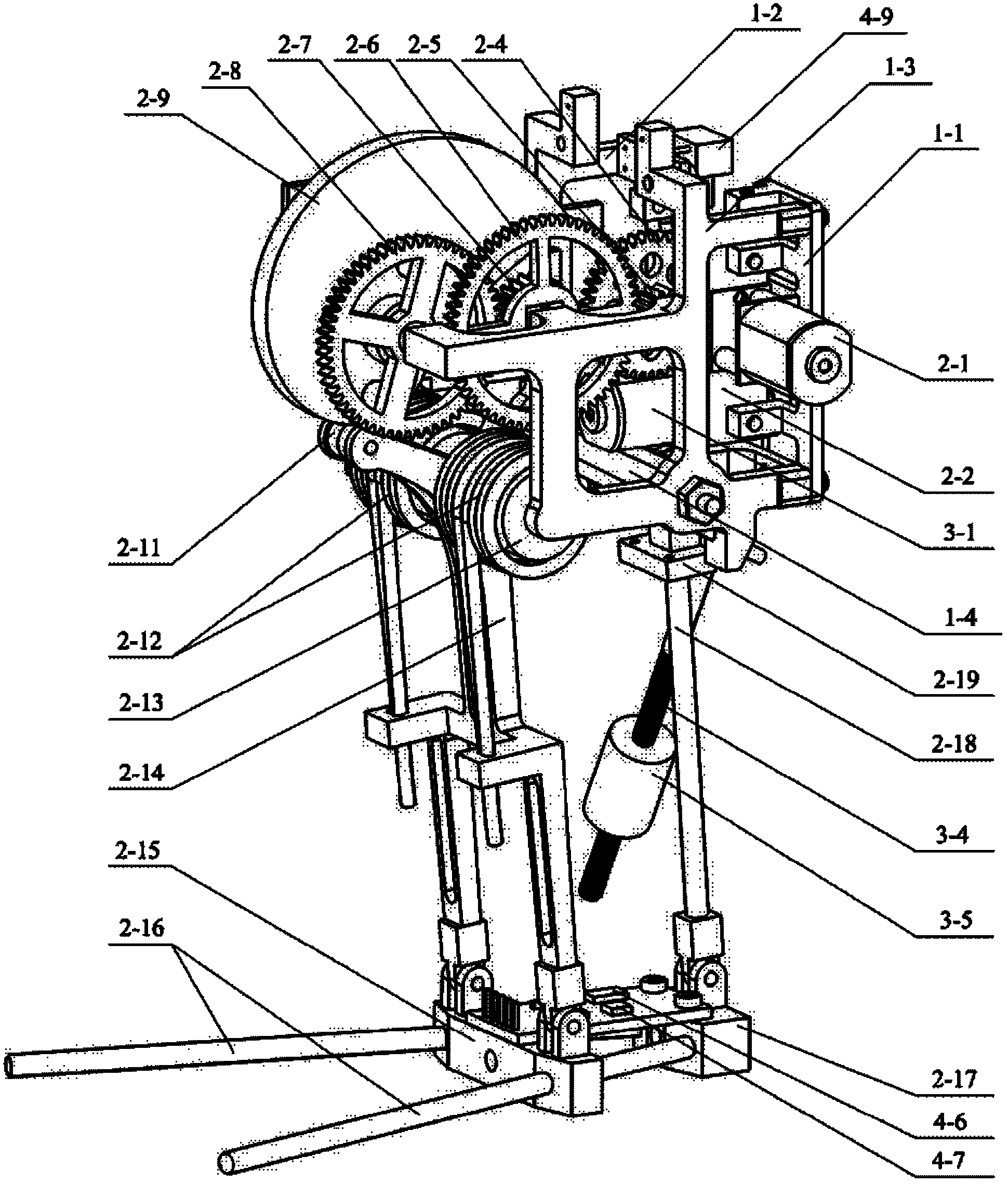
[0029] see Image 6 , The frame 1 includes a front end face 1-1, a left end face 1-2, a right end face 1-3 and a skeleton 1-4. The left and right end faces are fixed on the front end face with screws; the skeleton is riveted between the left and right end faces and fixed on the left and right end faces with nuts.
[0030...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More