

GSK-Link bus based modular robot control device and control method
A control device and robot technology, applied in the direction of program control of manipulators, manipulators, manufacturing tools, etc., can solve problems such as system failure, high cost, and poor bus scalability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
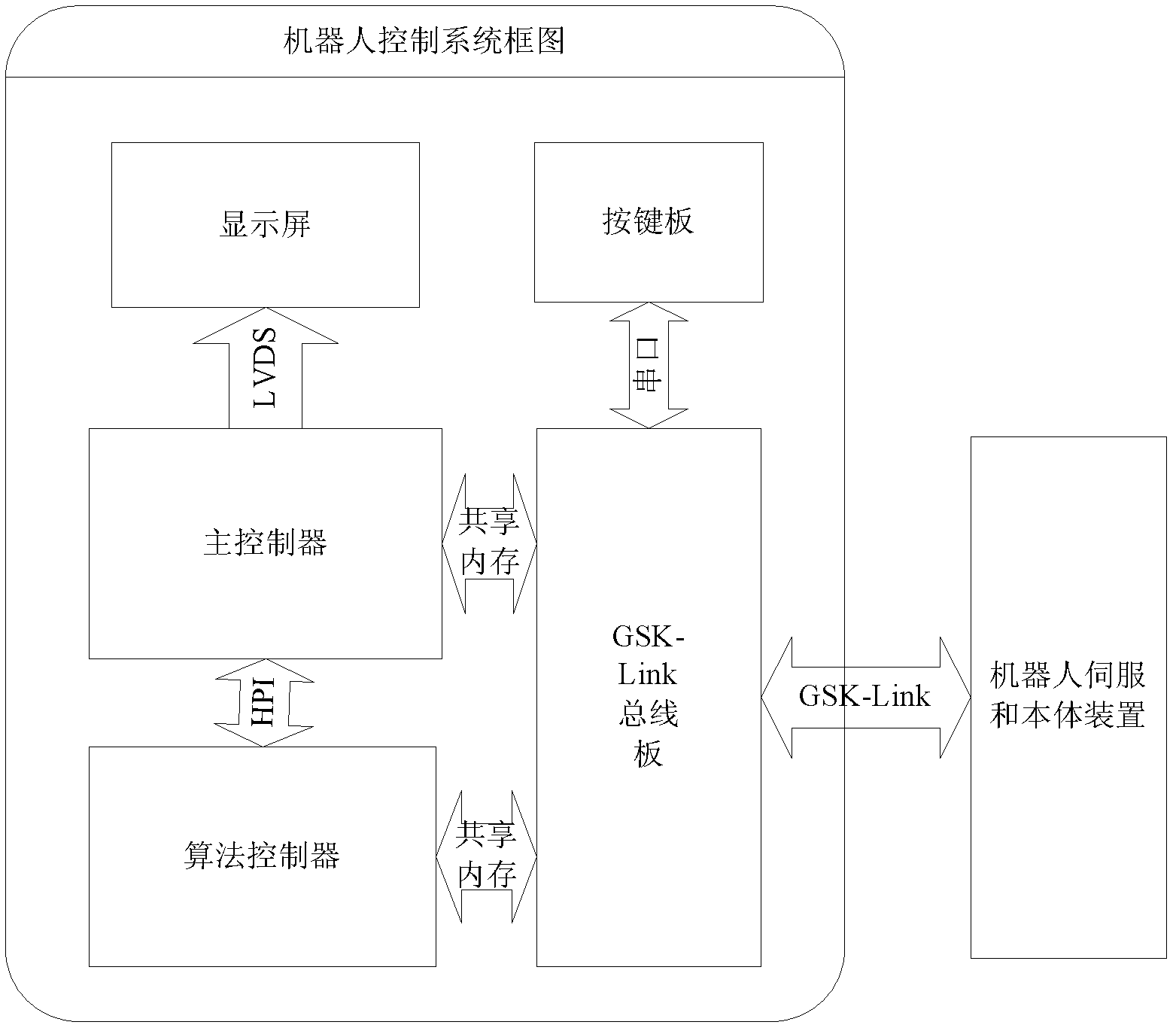
[0098] In this embodiment, a modular robot control device based on the GSK-Link bus, such as figure 1 As shown, it includes a main controller, an algorithm controller, a GSK-Link bus board, a display screen, and a key board; the main controller mainly completes robot teaching, teaching inspection, reproduction motion control, teaching programming, program explanation, Preprocessing and parameter setting functions; the algorithm controller mainly performs forward and reverse solution algorithms, interpolation algorithms, speed control, and trajectory planning operations on robot motion data; the GSK-Link bus board is used as a GSK-Link bus controller, mainly Complete the control of the GSK-Link bus; it sends the received motion data and parameter data to the servo device, and transmits the servo status data and the status data of the GSK-Link bus to the host computer for corresponding control; the display screen It is used to display program editing and robot status, which is c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More