

Hydraulic-drive lower-limb mechanism with load bearing capability of biped robot
A biped robot and robot technology, applied in motor vehicles, transportation and packaging, etc., can solve the problems of heavy weight, poor movement ability, complex mechanism and other problems of robots, and achieve strong walking ability, terrain adaptability, and high power/mass ratio , work smoothly
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
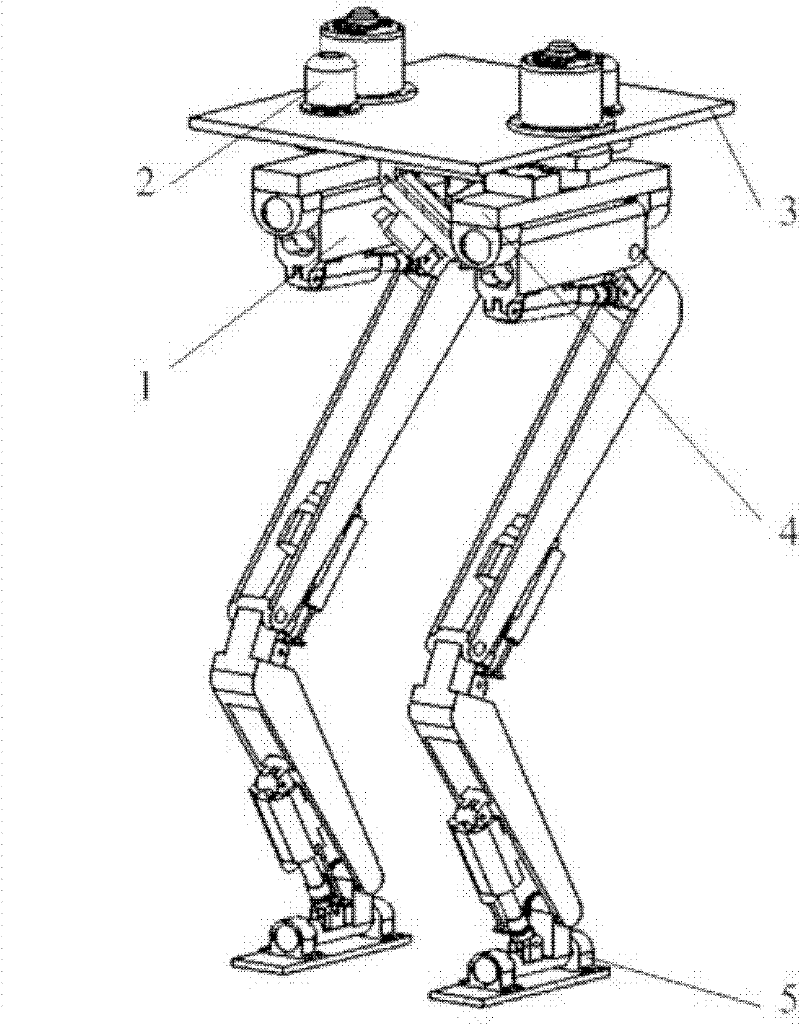
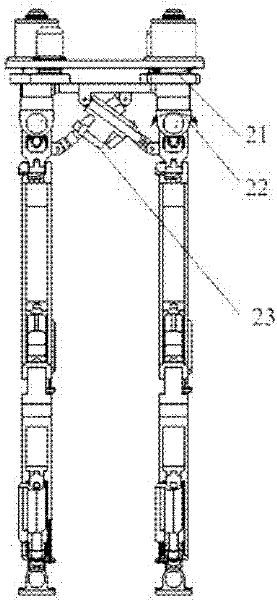
[0042] Such as figure 1 As shown, a hydraulically driven biped robot lower limb mechanism with load-bearing capacity includes: two robot legs 1, two robot steering mechanisms 2, a robot torso 3, two connecting devices 4 between robot torsos and legs, two Robot foot 5. The present invention has an active rotational degree of freedom rotating pair I21 taking the normal direction of the torso as the axis, a lateral active degree of freedom rotating pair II22, a lateral passive degree of freedom rotating pair VI37 and three forward active degrees of freedom are rotating pairs respectively. III26, revolving pair IV29 and revolving pair V32.
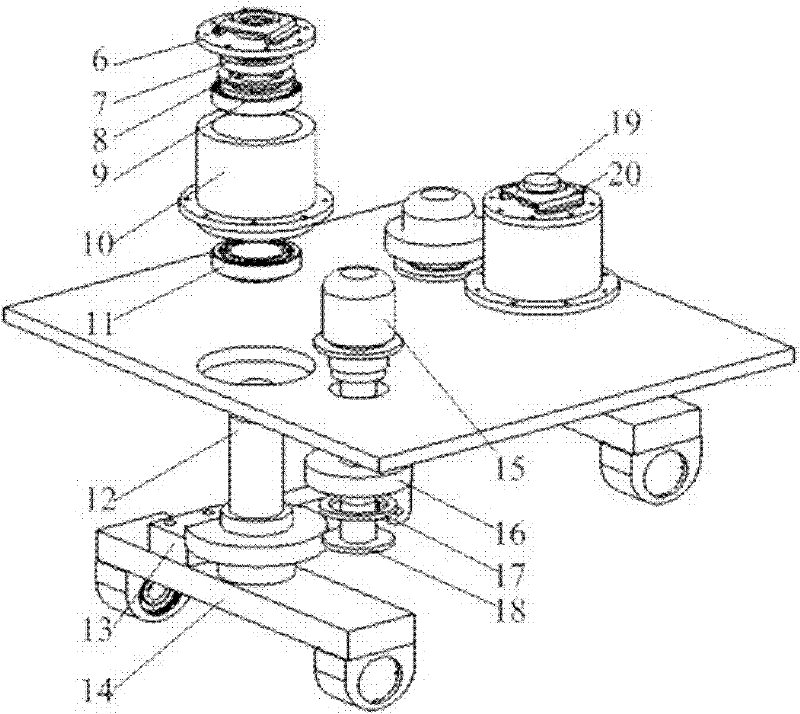
[0043] Such as figure 2 As shown, the steering mechanism 2 on each leg of the robot consists of a driving part and a driven part. The active part includes: a hydraulic motor 15, a spur gear 16, a stop washer I17, a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More