

Robot palletizer for carrying
A palletizing robot and rotating frame technology, applied in the field of handling palletizing robots, can solve problems such as adjustment, inconsistent movement direction and driving direction, and unstable mechanism system.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
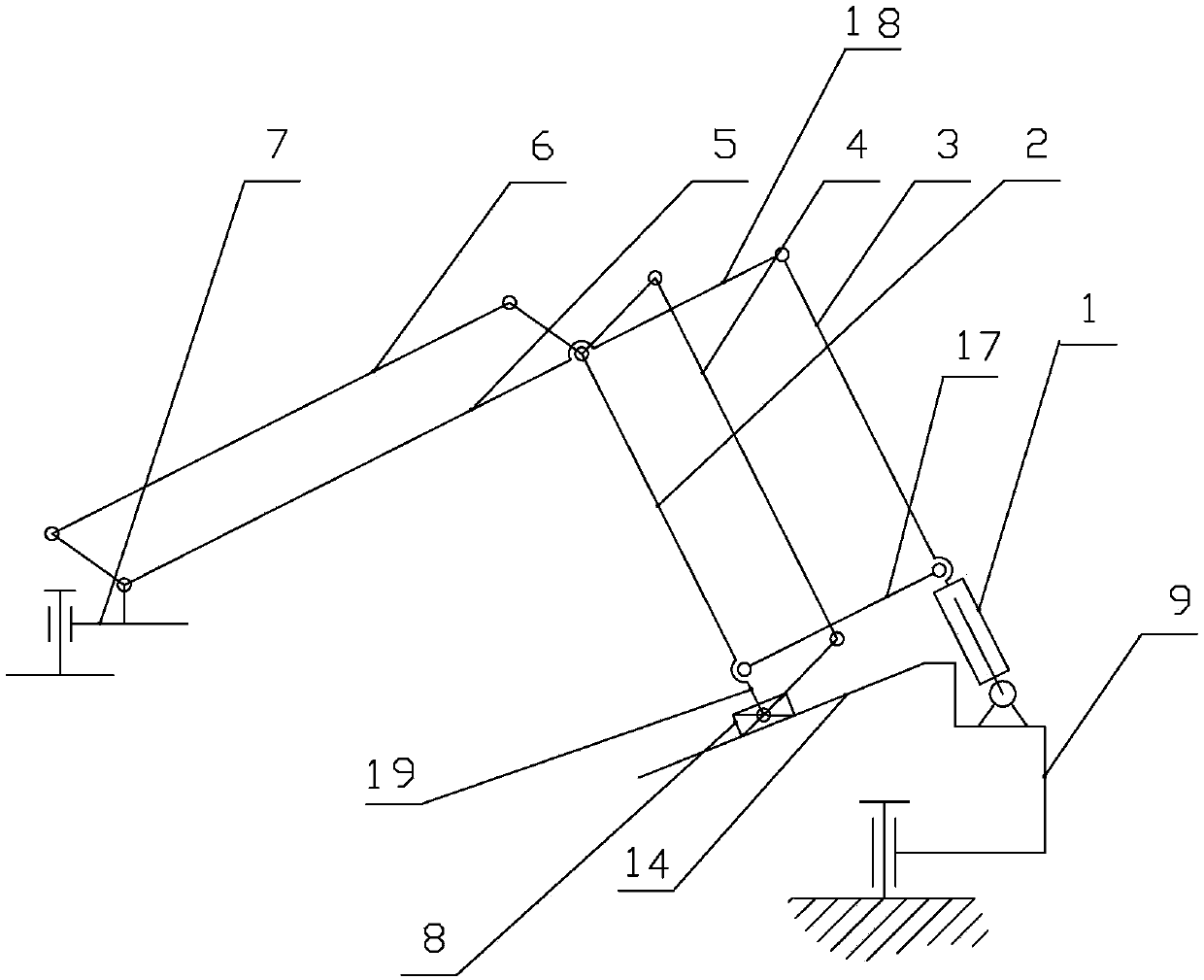
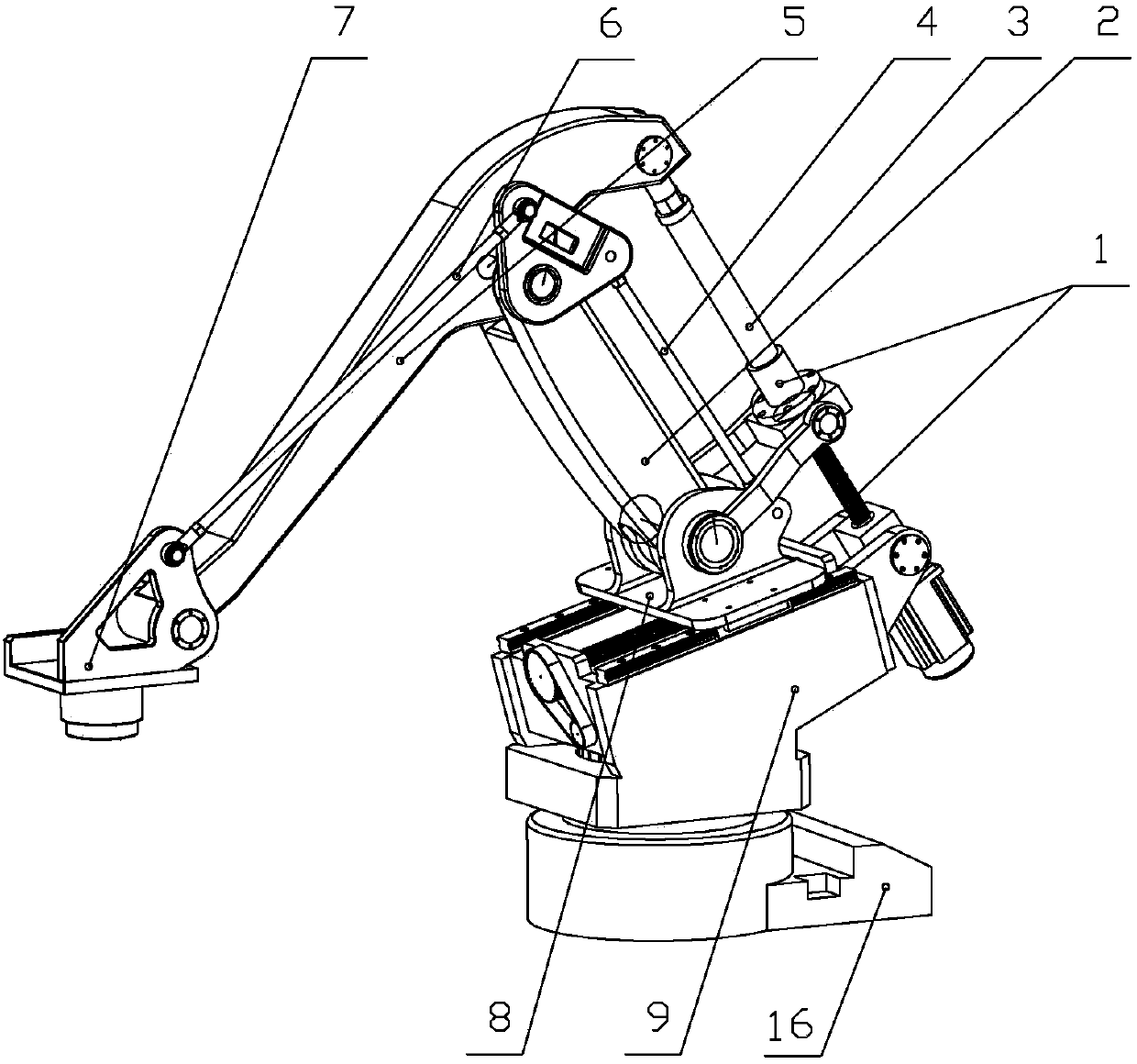
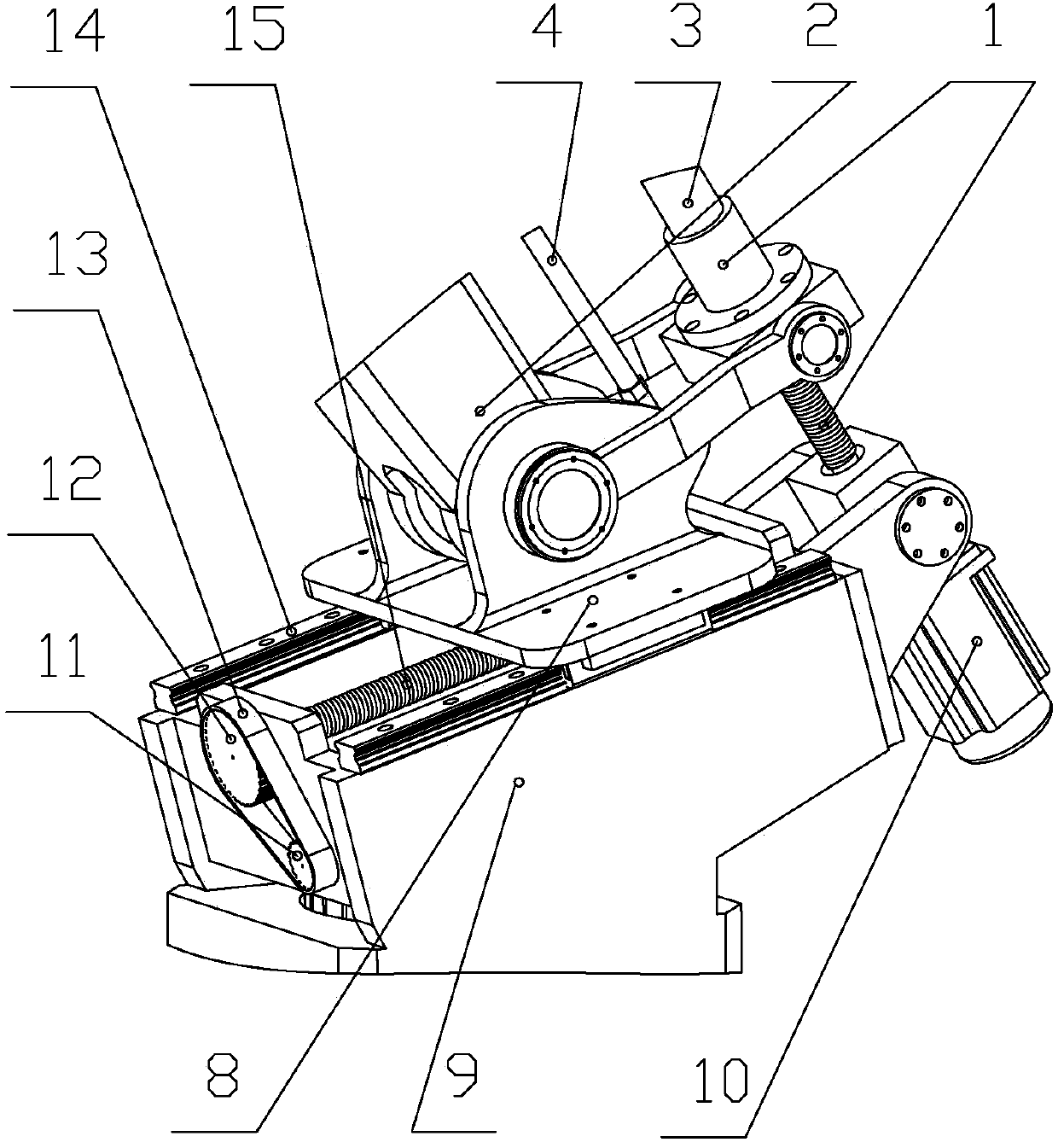
[0015] Such as figure 1 , figure 2 , image 3 As shown, the handling and palletizing robot of the present invention includes a base 16, a rotating frame 9 mounted on the base 16 that can rotate around the vertical direction, and a lower arm 2, a lower arm 17, and a lower arm mounted on the rotating frame 9. The upper arm parallelogram mechanism formed by the upper arm 3 and the upper forearm 18, the wrist horizontal posture maintaining the parallelogram machine 4, the arm 5, the arm parallelogram mechanism connected with the large arm parallelogram mechanism and the wrist horizontal posture maintaining the parallelogram mechanism 4 6. A wrist 7 connected with the arm parallelogram mechanism 6 that can rotate around the vertical direction. An inclined guide rail 14 is processed on the rotating frame 9, and a slide block 8 driven b...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More