

Target location method based on trifocal tensor pixel transfer
A technology of target positioning and pixel point, which is applied in the field of target positioning and can solve the problems of large size, high energy consumption of user nodes, and unsolved detection and positioning.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0035] Need to carry out following preparatory work before implementing the present invention:
[0036] Prepare two or more digital cameras, an ordinary personal computer, and a ruler. The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
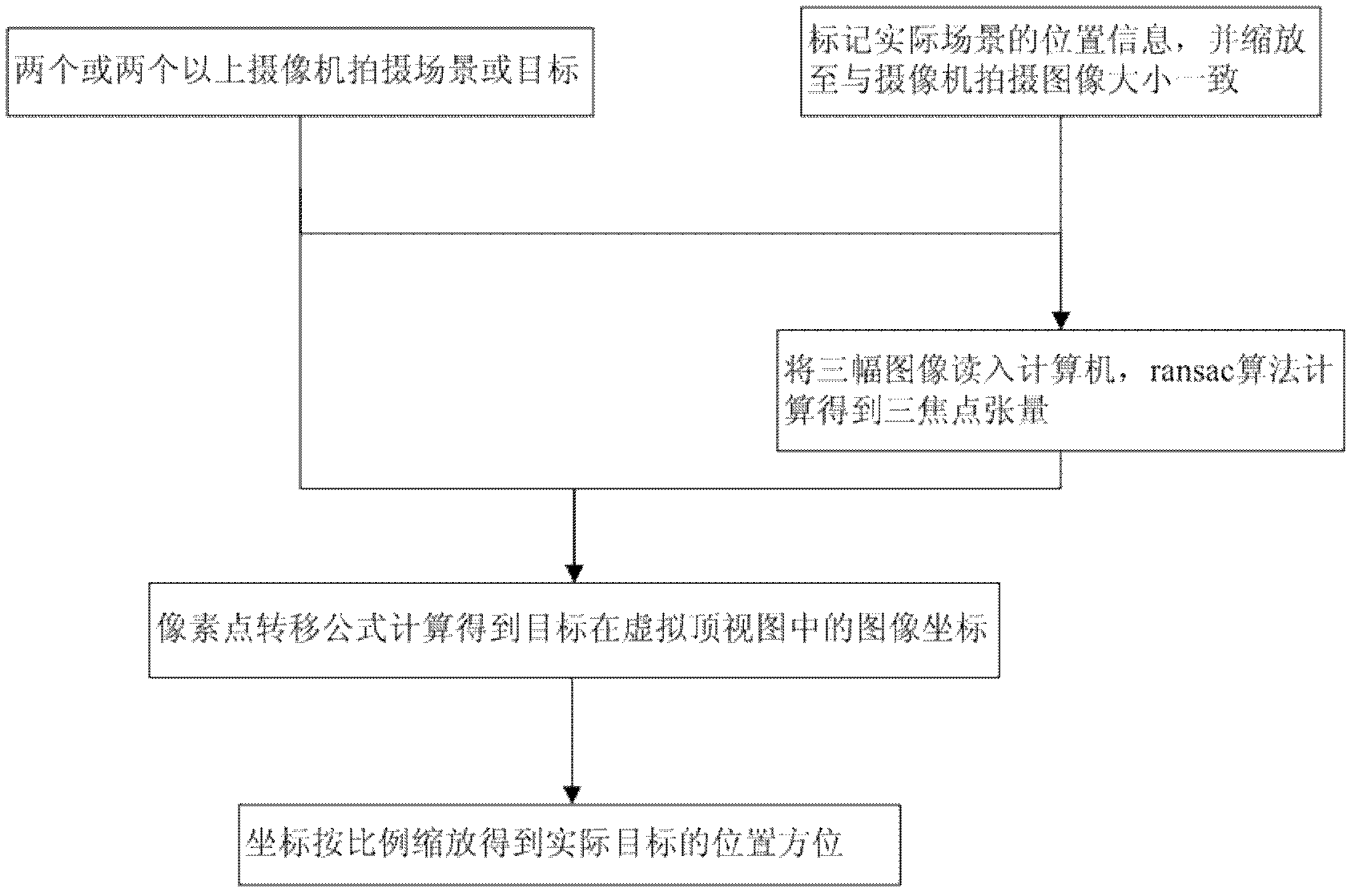
[0037] Such as figure 1 Shown as the overall flow chart of the present invention comprises the following steps:
[0038] Step 1: Before the target appears, use two or more cameras to shoot the scene, and the resulting image is read into the computer, assuming that the image size is m×n (pixel value);
[0039] Step 2: Before the target appears, use the ruler to mark the actual size coordinates of the main feature points of the scene captured by the camera in Step 1 to obtain a two-dimensional matrix, measure the actual size of the scene (length and width) M×N, and scale it to m×n, get a two-dimensional matrix of pixel coordinates;
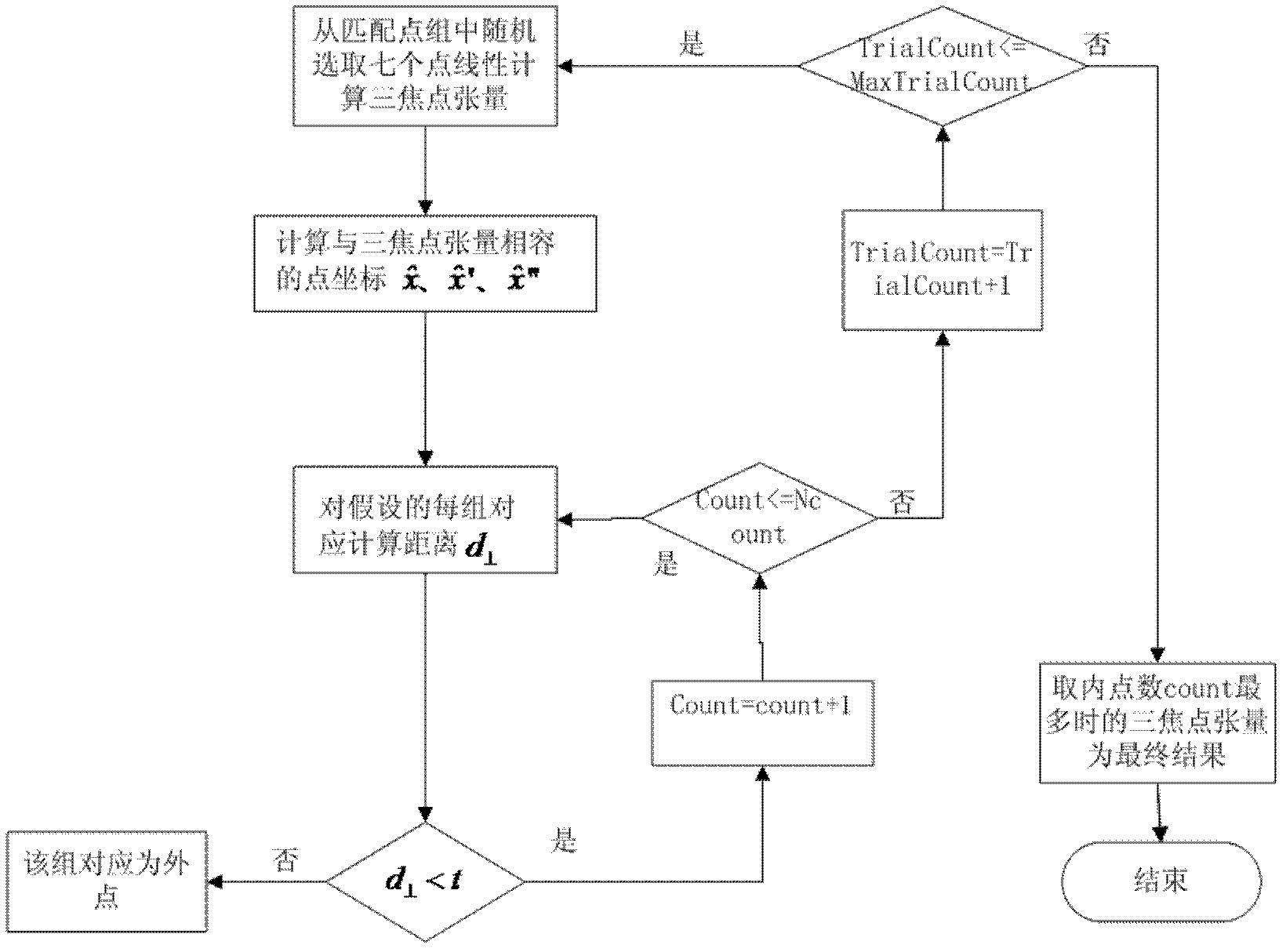
[0040] Step 3: Read the images obt...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More