

Waist movement planning method and device for preventing humanoid robot from tilting back and forth
A humanoid robot and motion planning technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as easy to tilt forward and backward, easy to fall, and affect the stability of the humanoid robot on the ground, so as to reduce the upper body tilt, The effect of improving stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] Based on the idea of waist motion compensation, the embodiment of the present invention provides a waist motion planning method for preventing a humanoid robot from tilting back and forth, including the following steps:
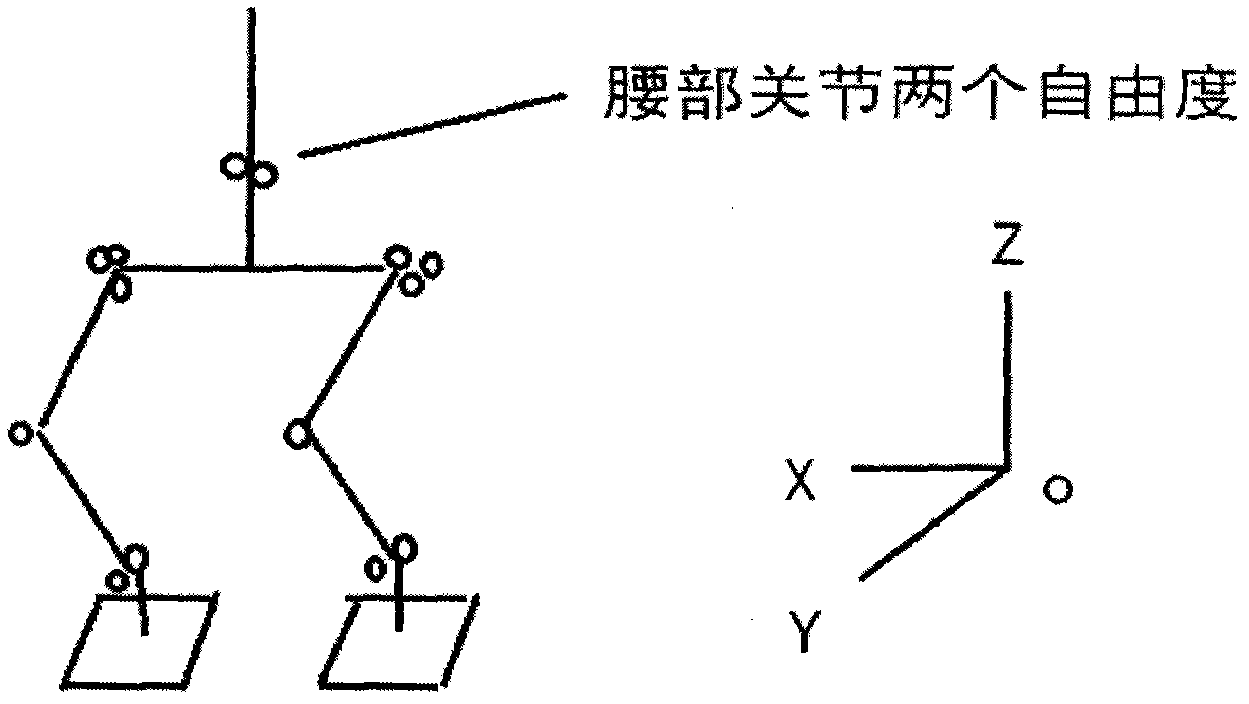
[0020] Simplify the human body motion model to obtain the extended waist model based on seven links of humanoid robot, such as image 3 shown. image 3 The lower limbs of the humanoid robot in the model have 12 degrees of freedom (one motor represents one degree of freedom), and each leg has 6 degrees of freedom, including 3 hip joints, 1 knee joint and 2 ankle joints. The world coordinate system is established with the right side of the humanoid robot as the positive direction of the X axis, the front of the humanoid robot as the positive direction of the Y axis, and the top of the humanoid robot as the positive direction of the Z axis.
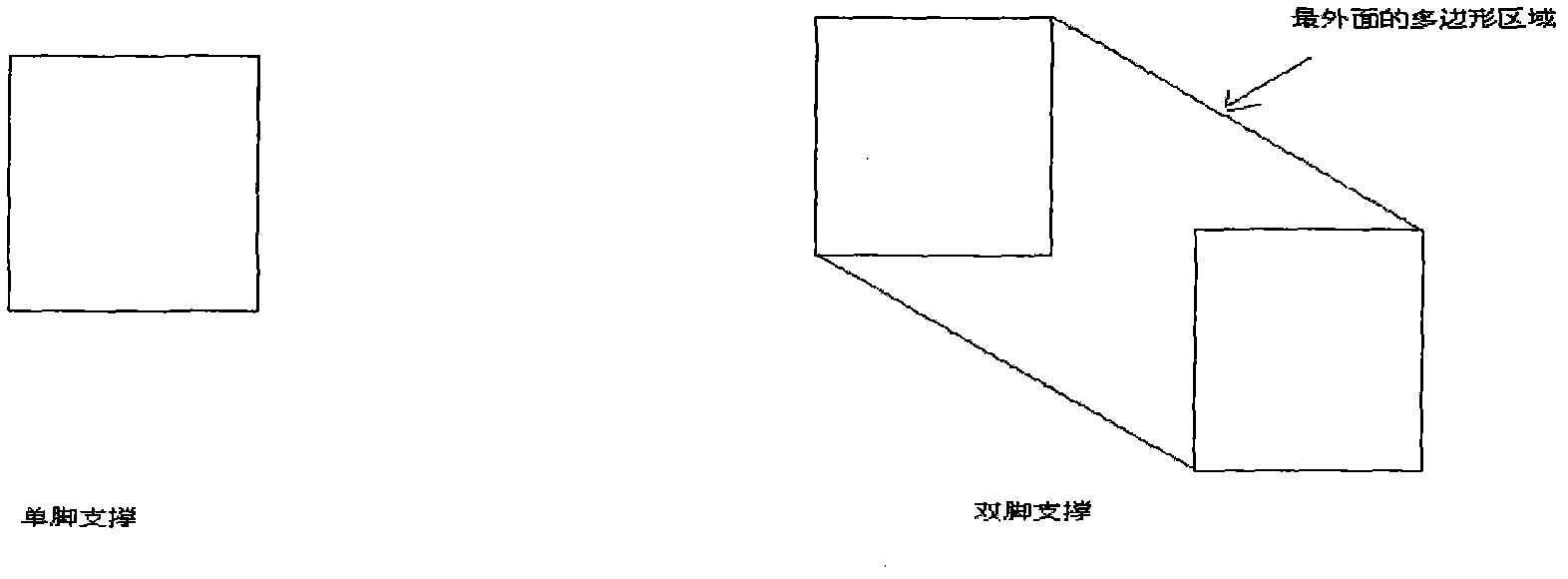
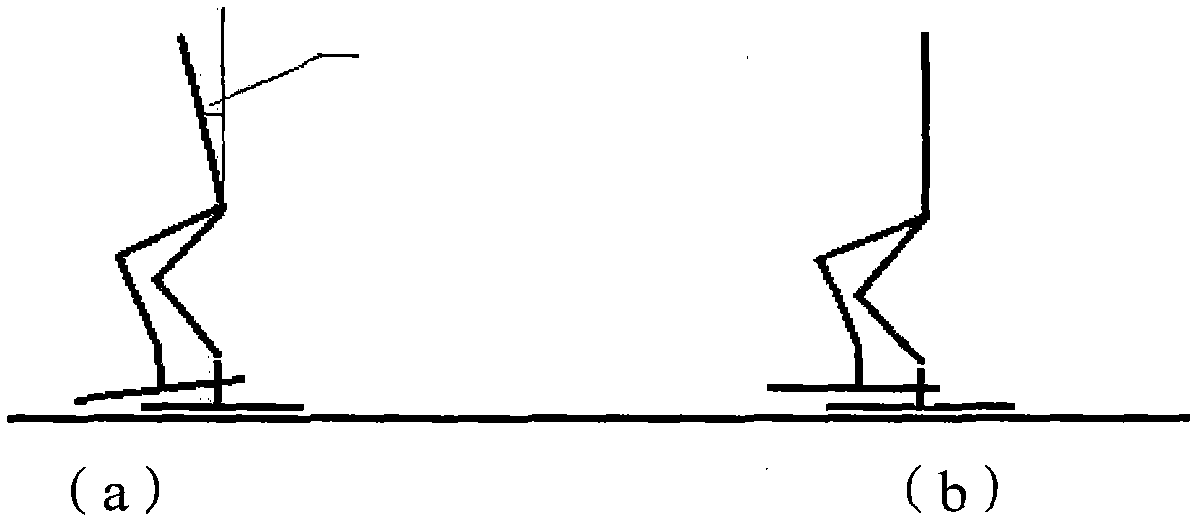
[0021] In order to prevent the humanoid robot from leaning back and forth when supporting on one foot, an appro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More