

Method of swing stopping control and system of swing stopping control of suspended load of crane
一种停止控制、负载物的技术,应用在载荷吊挂元件、运输和包装等方向,能够解决复杂加速度修正运算、技术不能直接地应用等问题,达到高度精确摆动停止控制、偏移角减小的效果
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] Hereinafter, embodiments of the present invention will be explained with reference to the drawings.
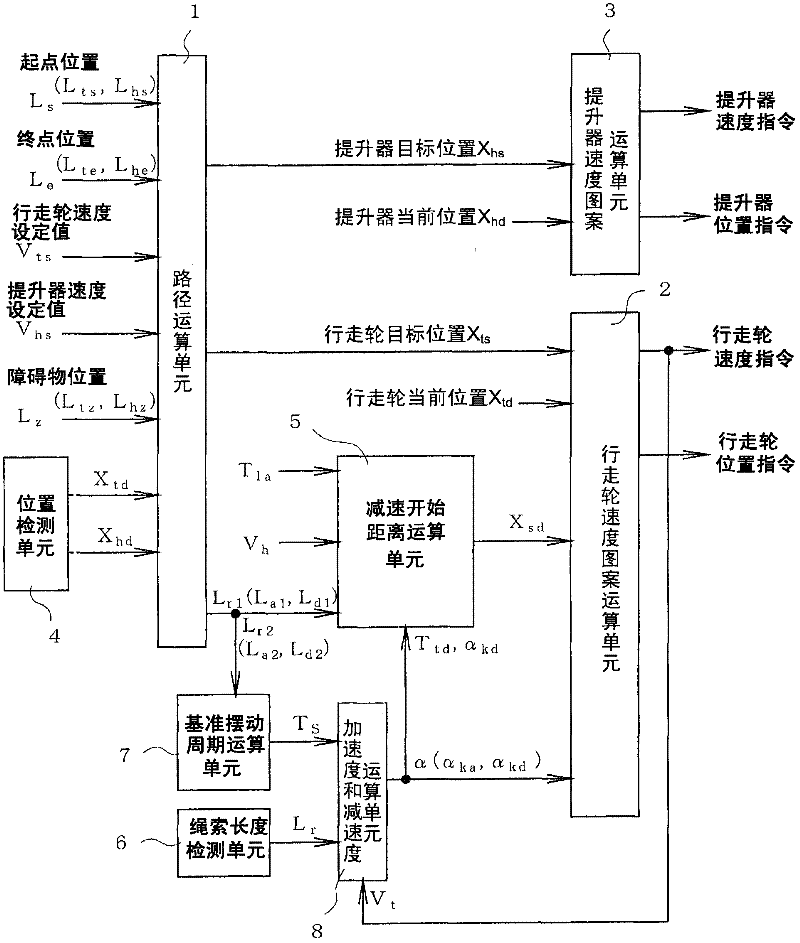
[0031] first, figure 1 is a block diagram of a drive control system for a crane including a swing stop control system according to the present invention. The drive control system is realized by, for example, a CPU and its execution program.
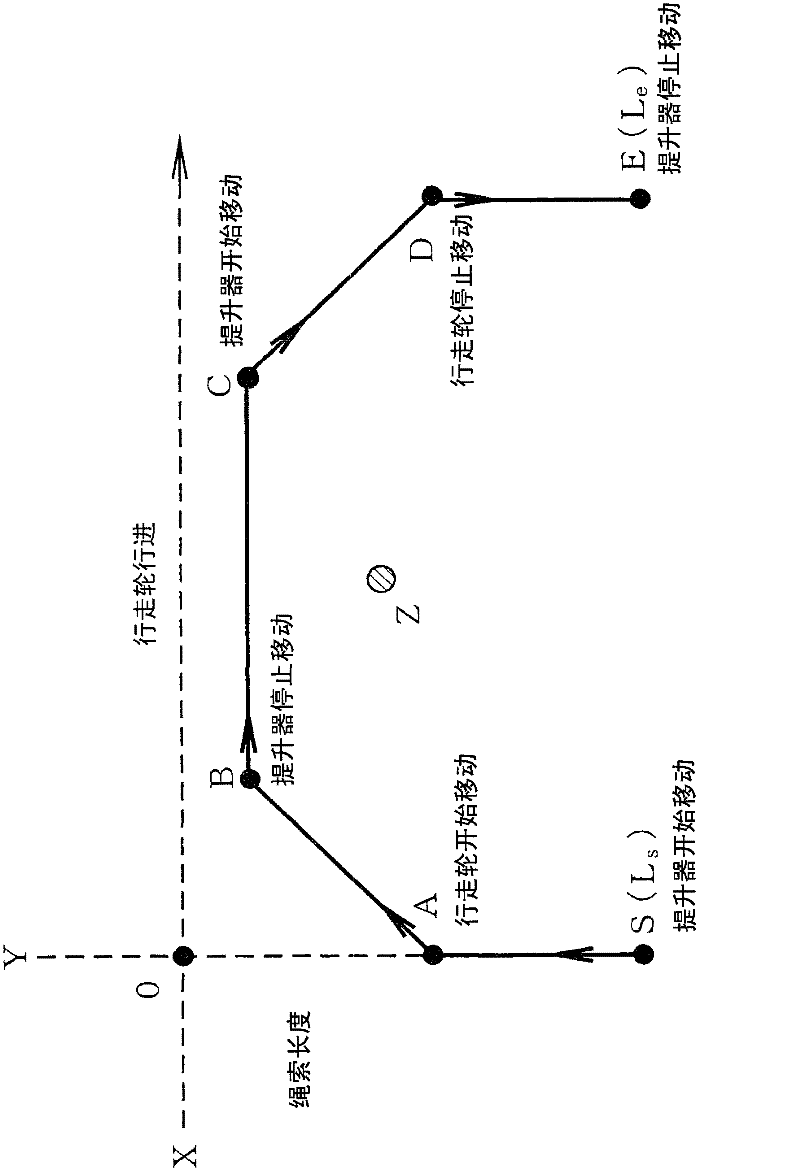
[0032] exist figure 1 , the path calculation unit 1 is at the starting position L of the crane s As the starting position of the suspended load, the end position of the crane L e As the end position of the suspended load, the speed setting value of the traveling wheel V ts , lifter speed setting value V hs , obstacle position L z , the current position of the walking wheel X td , and the current position of the lifter X hd Based on the data of the information, the optimal travel path of the suspended load is calculated for transporting the suspended load from the starting position to the end position while avoiding obstac...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More