

High-altitude dangerous environment article clearing system and clearing method based on flying robot
A technology for flying robots and objects, applied in the field of flying robots, can solve problems such as high economic costs, threats to workers' lives, and inability to carry out operations, achieving the effect of low investment costs and ensuring high efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
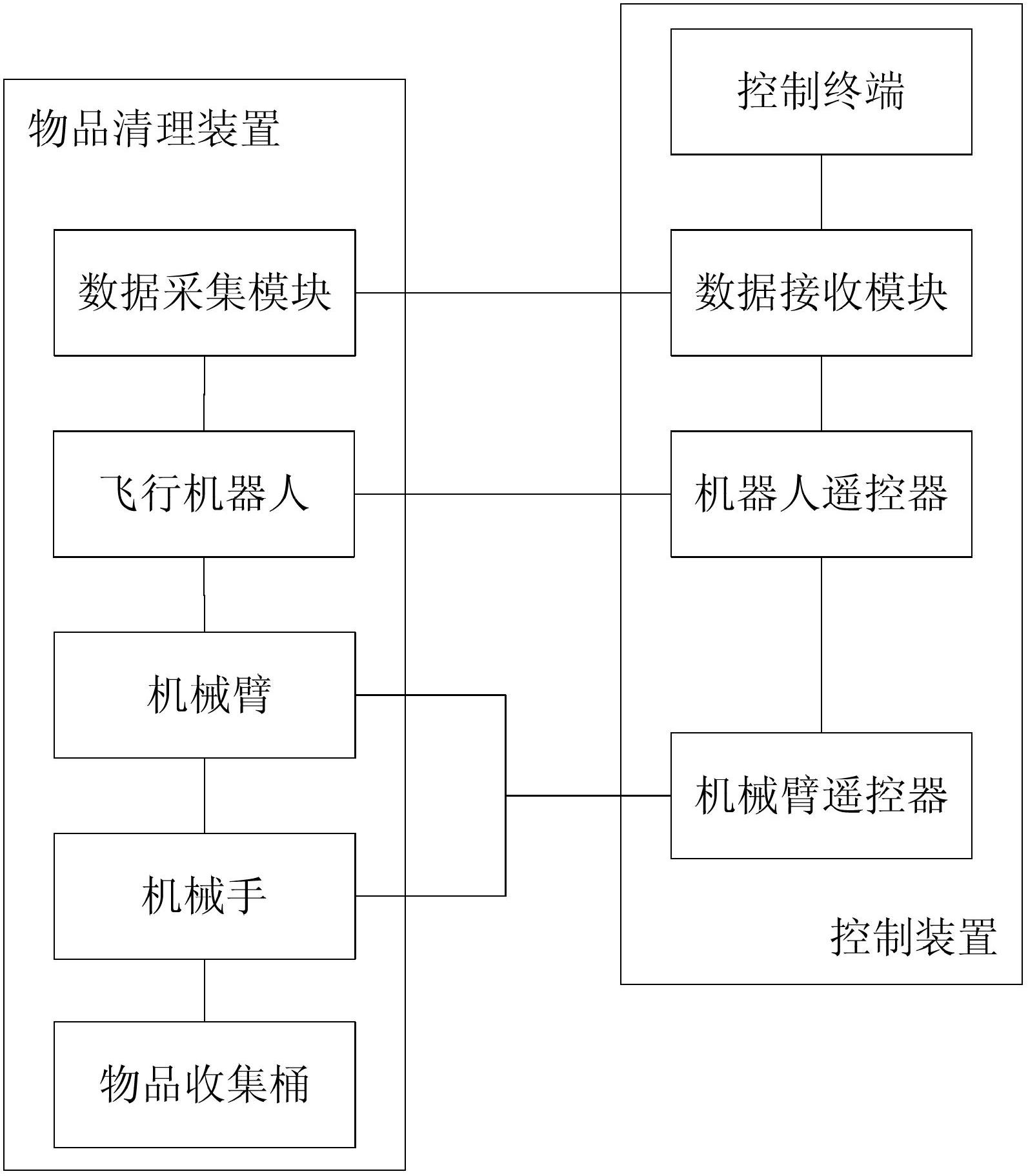
[0025] The main idea of the technical solution of the present invention: the dangerous environment object cleaning system includes an object cleaning device and a control device, the object cleaning device includes a flying robot and an image acquisition module installed under the flying robot, and the flying robot includes a mechanical arm and a control device installed under the flying robot. The manipulator on the mechanical arm; the image acquisition module is used to collect images around the flying robot; the control device includes an image receiving module, a remote controller and a control terminal, the image receiving module is connected to the control terminal, and the image receiving module is used to receive the image acquisition module The collected image data; the remote controller includes a remote controller of the flying robot and a remote controller of the mechanical arm, the remote controller of the flying robot is used to control the robot to approach the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More