

Improved iterative learning control method and control system for permanent magnet linear synchronous motor
A permanent magnet synchronous linear and iterative learning control technology, applied in control systems, AC motor control, estimation/correction of motor parameters, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0093] Embodiment of Iterative Learning Control Method for Permanent Magnet Synchronous Linear Motor
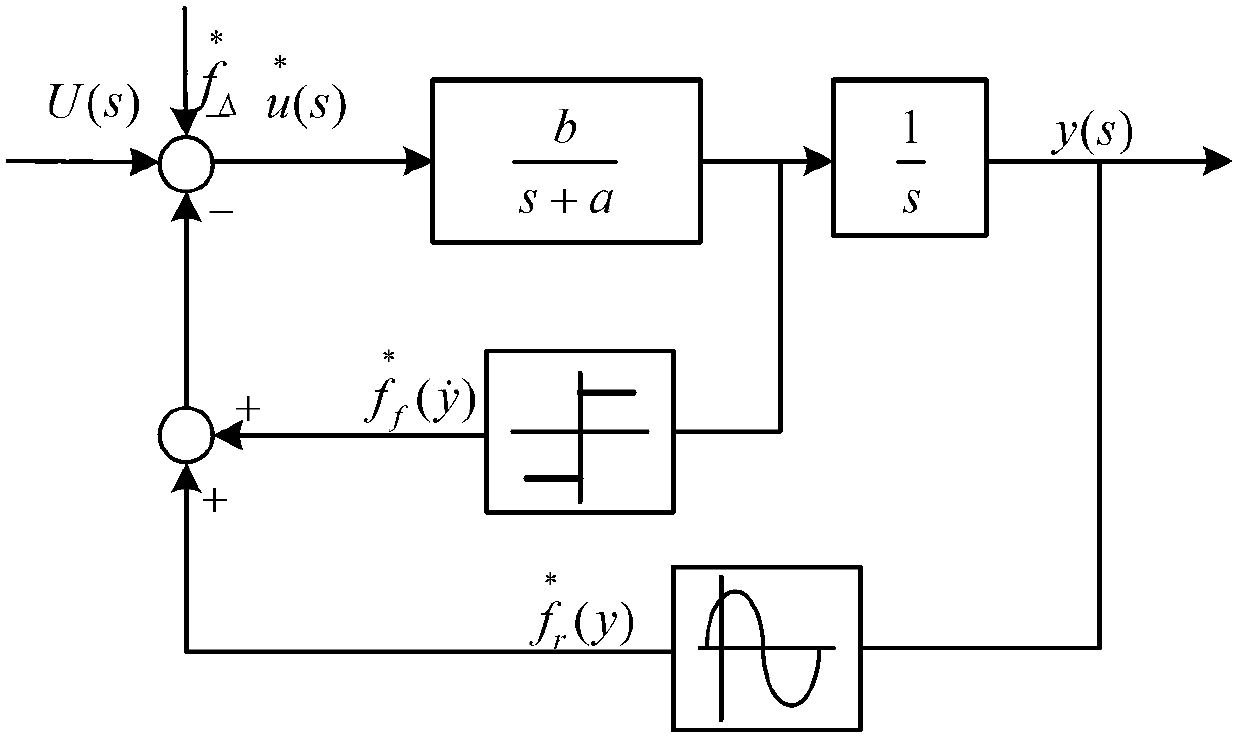
[0094] The simplified transfer function model of the permanent magnet synchronous linear motor in this example is:
[0095] y ( s ) u * ( s ) = b s 2 + as
[0096] The model uses figure 1 express, u * ( t ) = U ( t ) - f * r ( y ) - ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More