

Leg-foot mechanism with low rotational inertia configuration for four-footed robot
A robot, legs and feet technology, applied in the field of robotics, can solve the problems of poor safety of moment of inertia, unsuitable for the application of quadruped robots, etc., to achieve the effect of reducing moment of inertia, walking smoothly, and adapting to changes in the environment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with specific embodiments and with reference to the accompanying drawings.
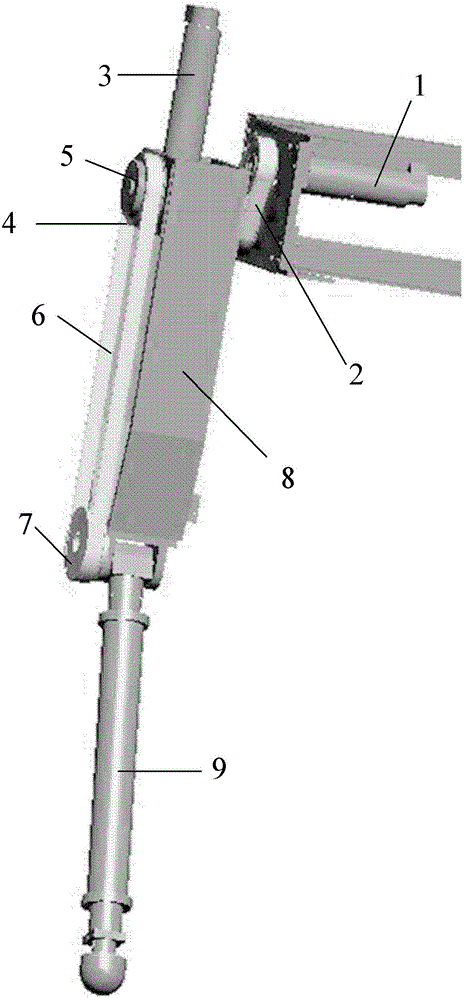
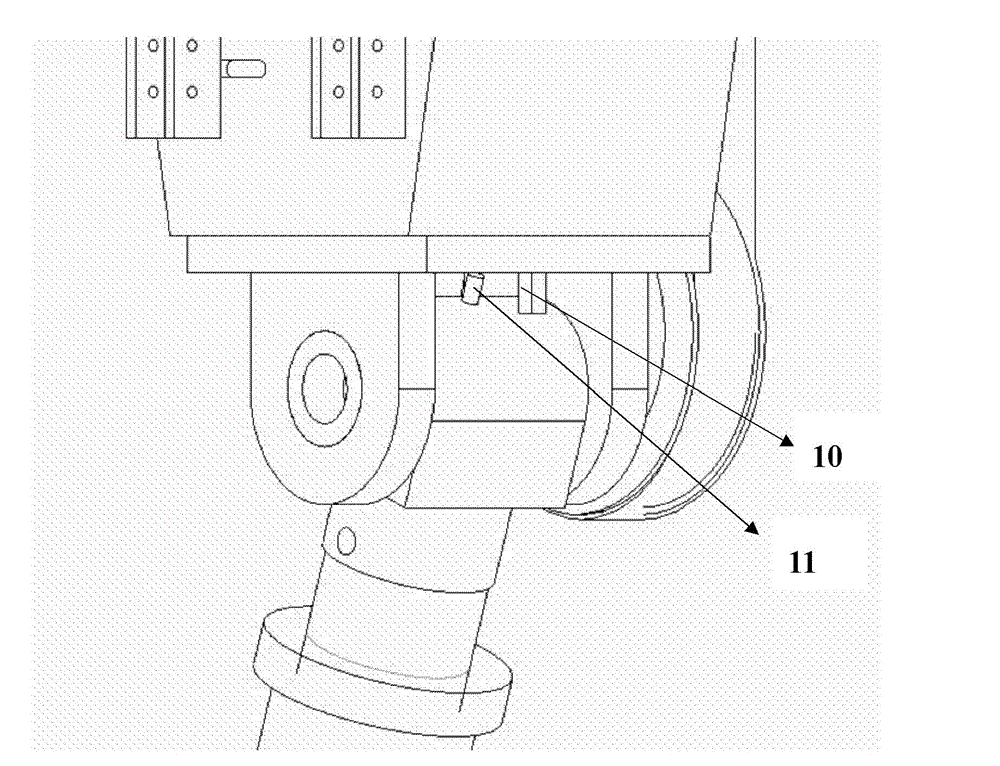
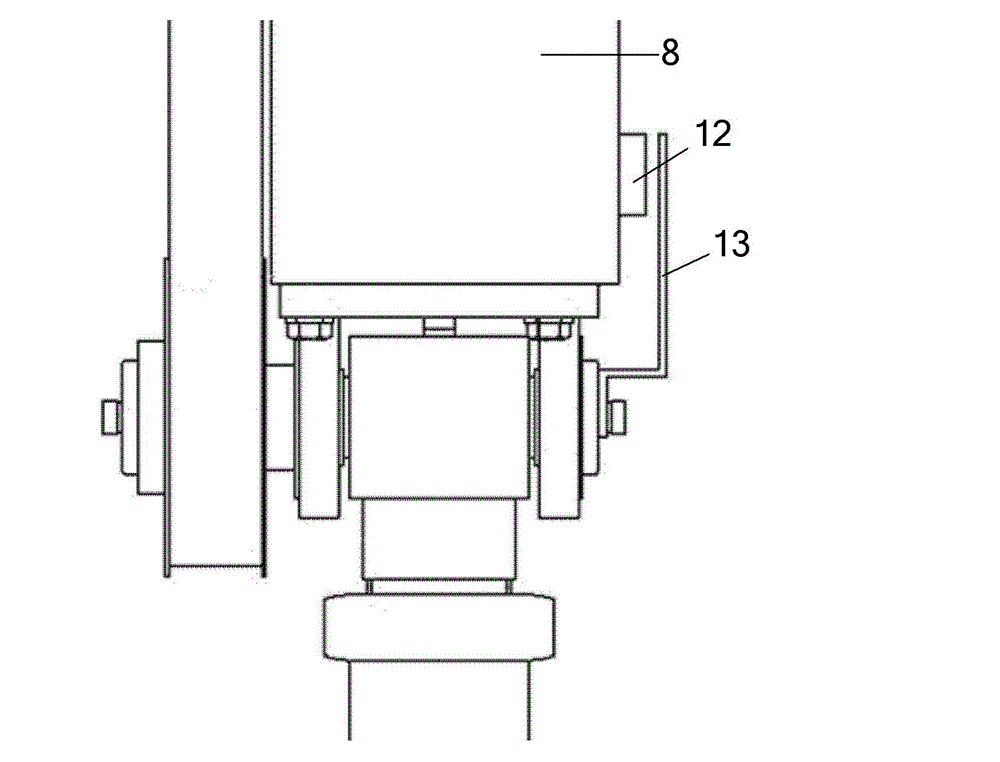
[0031] The invention discloses a leg-foot mechanism of a quadruped robot configured with low moment of inertia. The leg-foot mechanism includes a hip joint, a thigh, a knee joint, a lower leg and a foot. Wherein, both the hip joint and the knee joint are a pivot structure, that is, they have a fixed part and a pivoting part that pivots relative to the fixed part. The fixed part of the hip joint is fixedly connected to the body of the quadruped robot, and its pivotal part is fixedly connected to the upper part of the thigh; the fixed part of the knee joint is fixedly connected to the lower part of the thigh, and its pivotal part is fixedly connected to the upper part of the calf. Thus, the hip joint and the knee joint cons...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More