

Method for detecting multi-lane line on basis of random sample consensus (RANSAC) algorithm
A multi-lane and line detection technology, applied in computing, computer components, instruments, etc., can solve the problem of unresolved lane lines, achieve the effect of solving the problem of curved lanes and strong stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
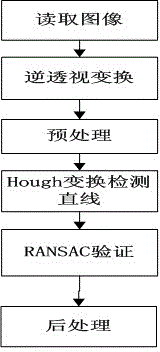
[0045] The real-time urban multi-lane line detection method based on the RANSAC algorithm, as shown in the figure, includes the following steps:
[0046] Step 1: Collect the original image of the road condition in front of the vehicle. During the driving process of the smart car, the original image of the road conditions in front of the vehicle is collected through the camera installed on the vehicle.
[0047] Step 2: Obtain an inverse perspective map (Inverse Perspective Mapping, IPM) from the original image. According to the internal parameters of the camera (focal length and optical center) and external parameters (pitch angle, horizontal angle and the height of the camera from the ground), the world coordinates are obtained. The center is the optical center of the camera, a camera coordinate, and a conversion matrix of image coordinates. For any point in the picture, after matrix transformation, it can be transformed into a point under the corresponding road coordinates. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More