Direct adaptive reconstruction control method for three-degree-of-freedom helicopter
A control method and a technology with a degree of freedom, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve problems such as insufficient rapidity and affecting the helicopter's self-regulation ability, achieve good self-regulation ability, and avoid fault-tolerant control Reduction of performance (or index), effect of convenient application
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings.
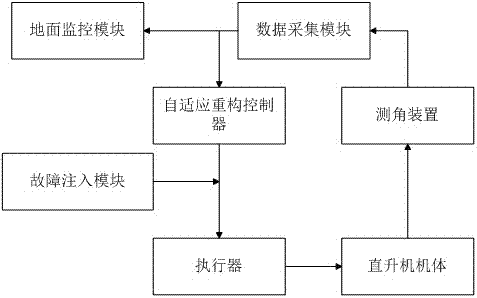
[0031] The present invention designs a direct adaptive reconfiguration control method for a three-degree-of-freedom helicopter, including a direct adaptive reconfiguration control law, including the control quantity u of the three-degree-of-freedom helicopter, the feedforward gain matrix K r , the input vector r of the three-degree-of-freedom helicopter reference model, and the fault compensation vector Also includes the state vector feedback gain matrix K of the reference model 1 , the feed-forward gain matrix K 2 , K 2 =K r , the output error gain matrix K 3 , the state vector x of the three-degree-of-freedom helicopter reference model m , the output error e of the three-degree-of-freedom helicopter y , the model structure of the direct adaptive reconfiguration control law is as follows:
[0032] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More