

Closed-loop control distribution method of multi-control surface unmanned aerial vehicle based on angular acceleration sensor
A technology of angular acceleration and closed-loop control, which is applied in directions such as acceleration measurement using inertial force, three-dimensional position/channel control, etc. It can solve problems such as inability to obtain control effects, and achieve simple principles, good control distribution effects, and convenient effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The present invention will be further described in detail with reference to the accompanying drawings and embodiments.
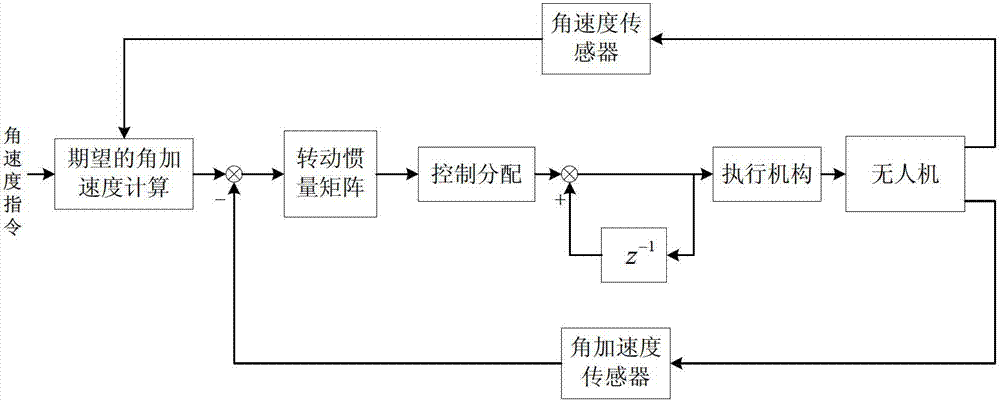
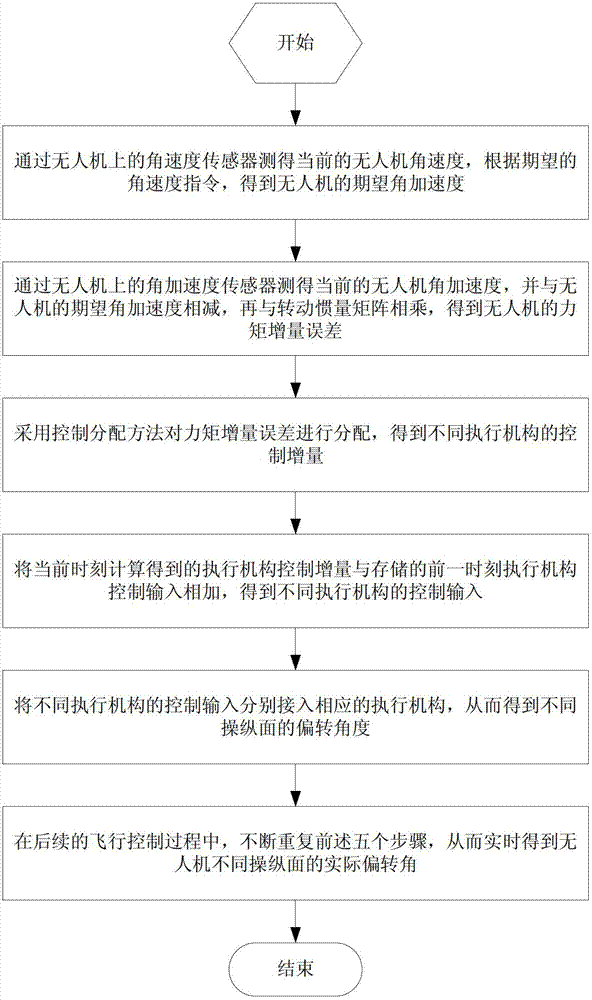
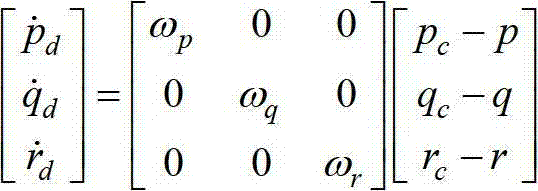
[0021] The present invention is a closed-loop control distribution method for multi-control surface unmanned aerial vehicle based on angular acceleration sensor. The principle structure is as follows: figure 1 As shown, the expected angular acceleration calculation module obtains the expected angular acceleration command according to the angular velocity information and angular velocity command information of the drone measured by the angular velocity sensor, and subtracts it from the angular acceleration information of the drone measured by the angular velocity sensor to obtain the angle Acceleration error, the error is multiplied by the moment of inertia matrix to obtain the torque incremental error, and the torque incremental error is distributed through the control allocation module to obtain the current moment actuator control increment, and then ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More