

Three-dimensional complex modeling method utilizing rotating TIN (triangulated irregular network) and distance and included angle dual-weight interpolation method
A modeling method and interpolation technology, applied in the field of three-dimensional modeling, can solve the problems of insufficient dispersion and interleaving between data, insufficient degree of echo and coordination, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
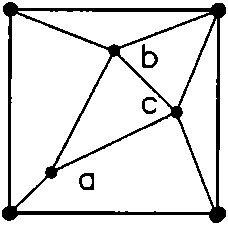
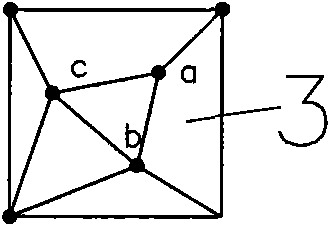
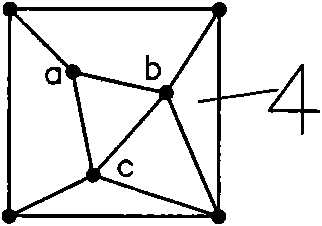
[0088] Specific implementation mode one: the following combination Figure 8 to Figure 13 This embodiment will be specifically described. The present embodiment comprises the following steps: one, set the resolution to be 15mm, and use twice 30mm of 15mm as the side length of the basic square; two, arrange a control point at each of the four vertices of the basic square, and distribute them in the basic square Three control points, see illustration figure 1 , the plane coordinates of the four vertices are (0, 0), (30, 0), (30, 30) and (0, 30), point a is (9, 9), point b is (12, 22.5) , point c is (24, 12), the above-mentioned three points a, b, c are connected to form a triangle, and the above-mentioned three internal control points are connected to form a triangle, and then a vertex is selected from the four vertices of the basic square, and the distance between the vertex and The sum of the distances between the two vertices of the adjacent inner triangles is the smallest,...
specific Embodiment approach 2
[0153] Specific implementation mode two; see illustration figure 1 to indicate Image 6 , the difference between this embodiment and Embodiment 1 is: in step 2, the three control points distributed in the basic square are a(6,6), b(15,24), c(24, 15); other steps are the same as in Embodiment 1.
[0154] Compared with Embodiment 1, this embodiment has better dispersibility along the direction and tendency of the control points in the basic unit in Embodiment 1; this embodiment has better dispersibility along the direction and tendency of the control points in the supporting units; 2. The length between two adjacent control points in the sampling network is reduced compared with Embodiment 1, within the range of 0.43-0.67 times the side length of the basic square.
specific Embodiment approach 3
[0155] Specific implementation mode three: see Figure 14 to Figure 19 , the difference between this embodiment and Embodiment 1 is: in step 2, one control point is arranged at each of the four vertices of the basic square, and three control points are scattered and arranged in the basic square, and the above-mentioned internal three points are connected to form a triangle , and then arrange a control point at the midpoint on the right side of the basic square, and add a total of eight control points to the control points on the four vertices of the basic square and the three control points scattered in the basic square. signal Figure 14 The eight control points are (0, 0), (30, 0), (30, 30), (0, 30), a (8.31, 13.62), b (15, 24), c (20.37, 6 ), d(30, 15). Connect the control point at the midpoint on the right side of the square with the two control points of the inner nearest triangle respectively, and connect the two square vertices on the same straight line as the control...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More