

Unit module mechanism of modular reconfigurable robot
A technology for reconstructing robots and unit modules, applied in the field of robots, can solve the problems of inaccurate adjustment of rotation angle, insufficient movement ability, and low movement efficiency, and achieves the effect of simple structure, convenient reconstruction and combination, and ensuring flexibility.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention will be described in further detail below in conjunction with the accompanying drawings.
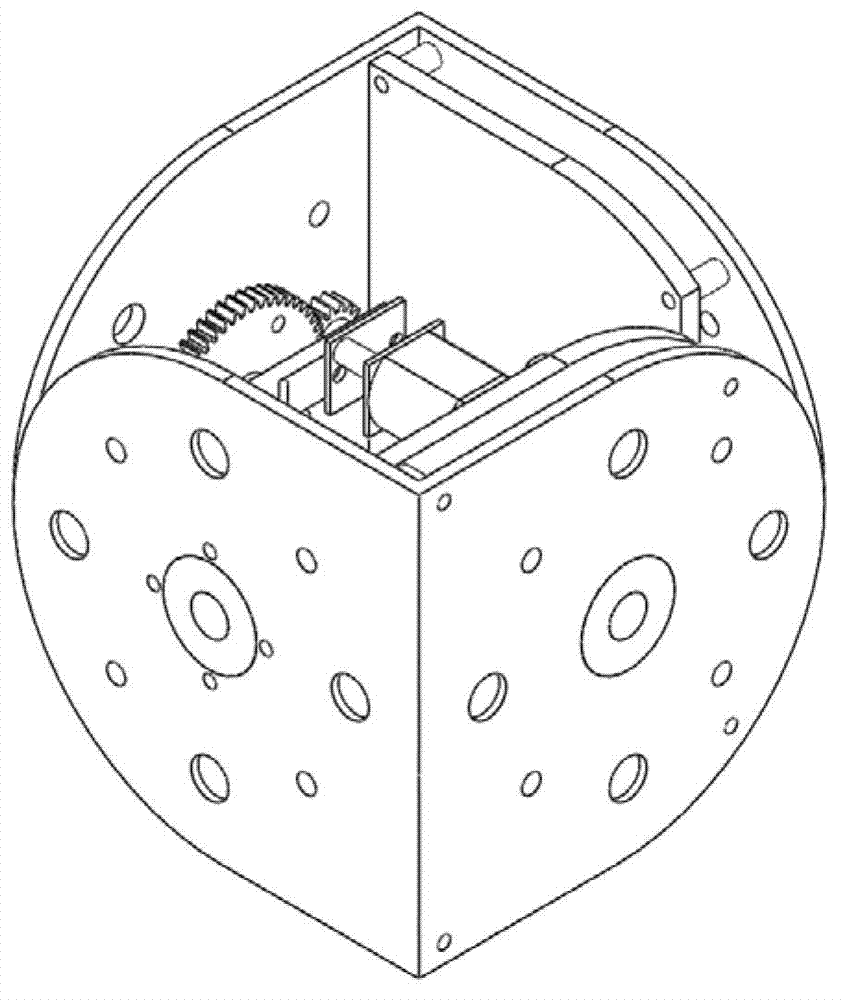
[0024] Such as figure 1 As shown, the unit module mechanism of the present invention consists of two L-shaped front and rear arms with identical structures, and a link device.
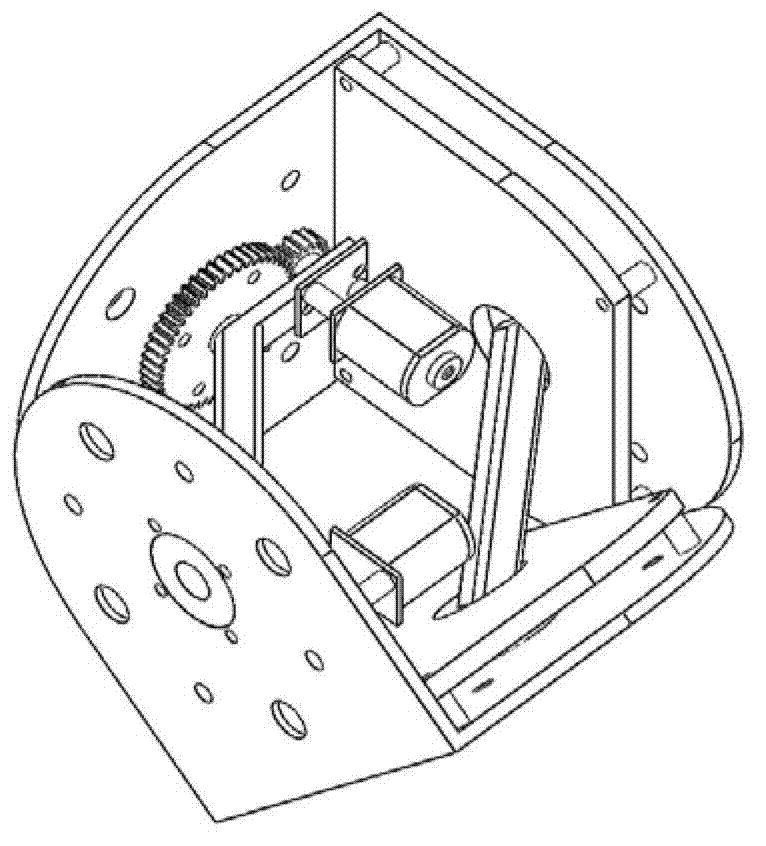
[0025] Such as figure 2 and image 3 As shown, the forearm and the rear arm of the unit module mechanism can be rotated up and down along their respective semicircular arc edges under the drive of the link device, so as to realize the precise adjustment of the interface angle of the forearm or the rear arm.
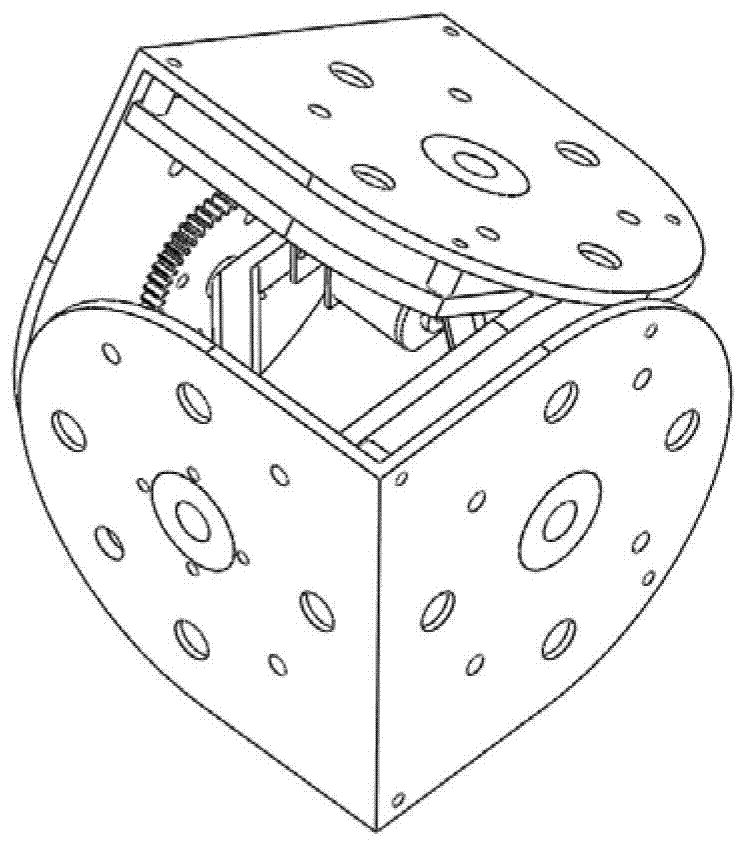
[0026] Such as Figure 4 and Figure 5 Shown is the overall rotation view and top view of the unit module mechanism. L-shaped forearm comprises forearm L-shaped semicircle outer plate 116, forearm circuit board 112, forearm copper pillar 111,115, forearm bearing 113,117 and forearm rotating gear 119; L-shaped rear arm comprises rear arm L-shaped semicircle outer plate 105 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More