

Method for navigating underwater robot by matching surface terrain
An underwater robot, terrain matching technology, applied in the field of navigation, can solve problems such as unfavorable long-term operation of AUV
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The present invention is described in more detail below in conjunction with accompanying drawing example:
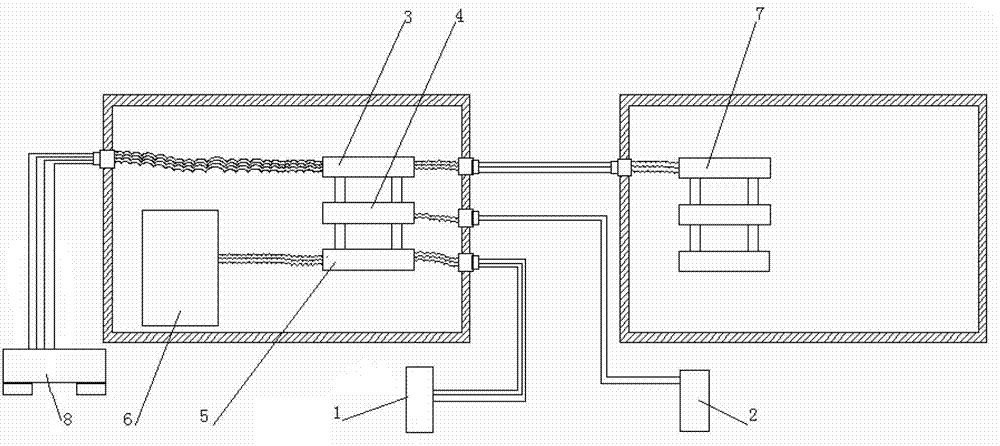
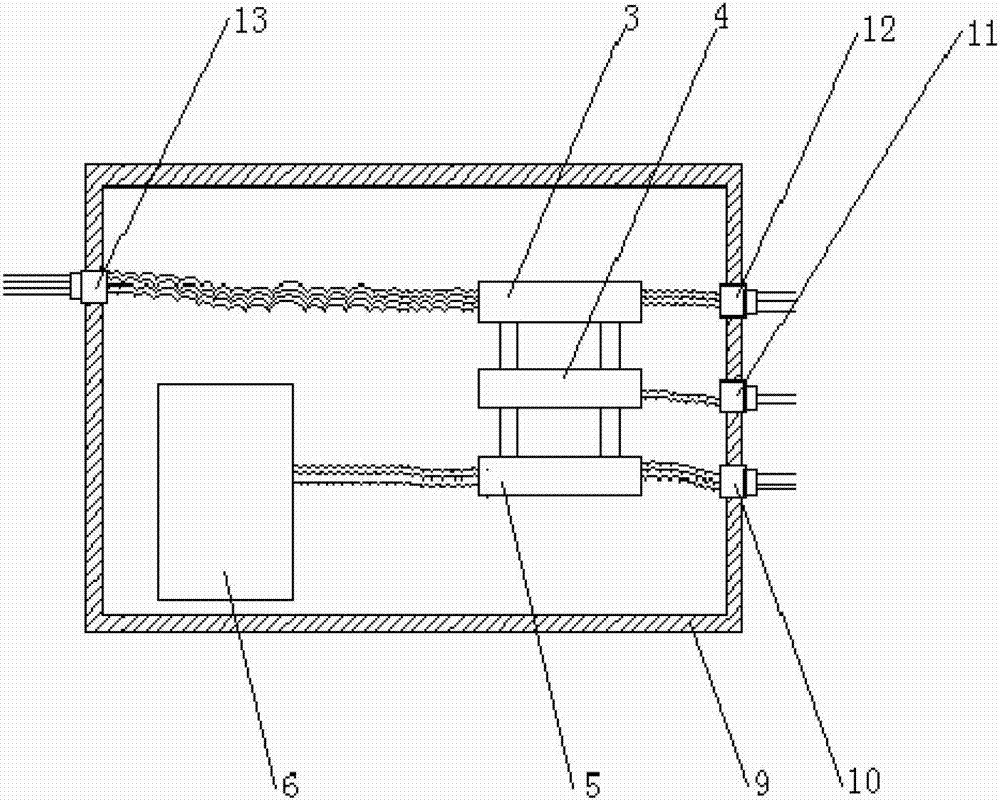
[0021] combine Figure 1~3 , the underwater robot line terrain matching device consists of a sound velocity profiler 1, a hydraulic depth gauge 2, a PC / 104 computer 3, a PC / 104 bus AD acquisition card 4, a PC / 104 bus serial port board 5, and an inertial navigation device 6 , main control computer 7, multi-beam sonar 8. Simultaneously combine figure 2 , PC / 104 computer 3, PC / 104 bus AD acquisition card 4 and PC / 104 bus serial port board 5 are plugged in through the bus, and are sealed together in the PC / 104 computer watertight casing 9, and four pieces are arranged on the PC / 104 computer watertight casing Watertight plug, watertight plug 10 connects sound velocity profiler 1 and PC / 104 bus serial port board 5, watertight plug 11 connects pressure depth gauge 2 and PC / 104 bus AD acquisition card 4, watertight plug 12 leads three connection lines, The PC / 104 comp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More